|
|
Номер команды: ТЭЛ-03
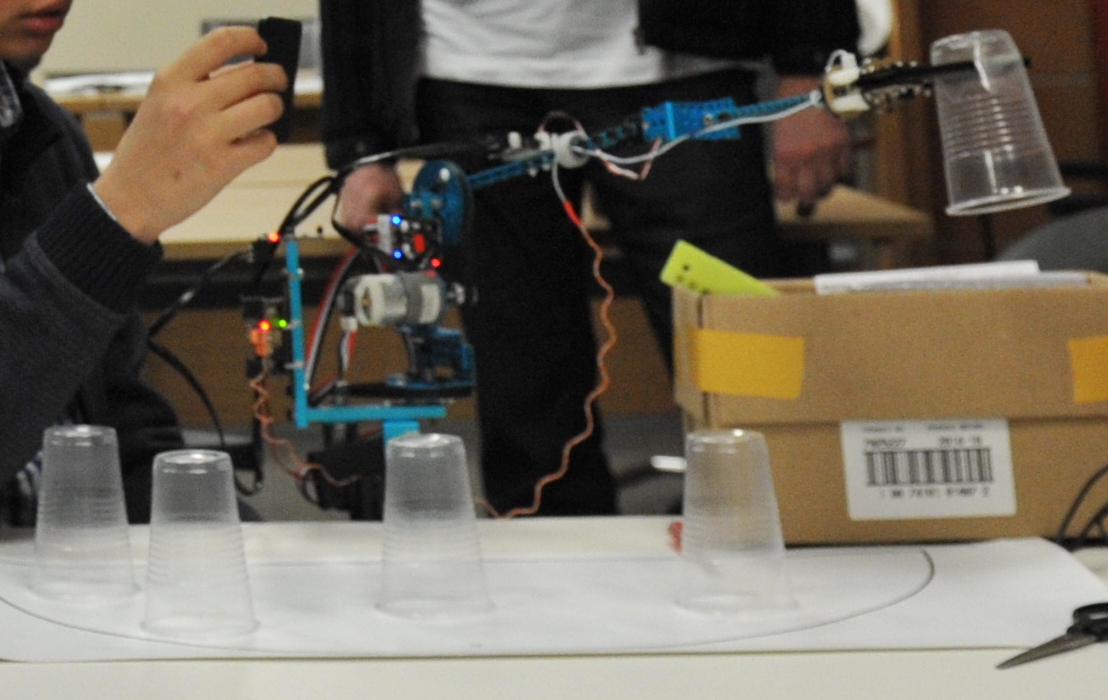
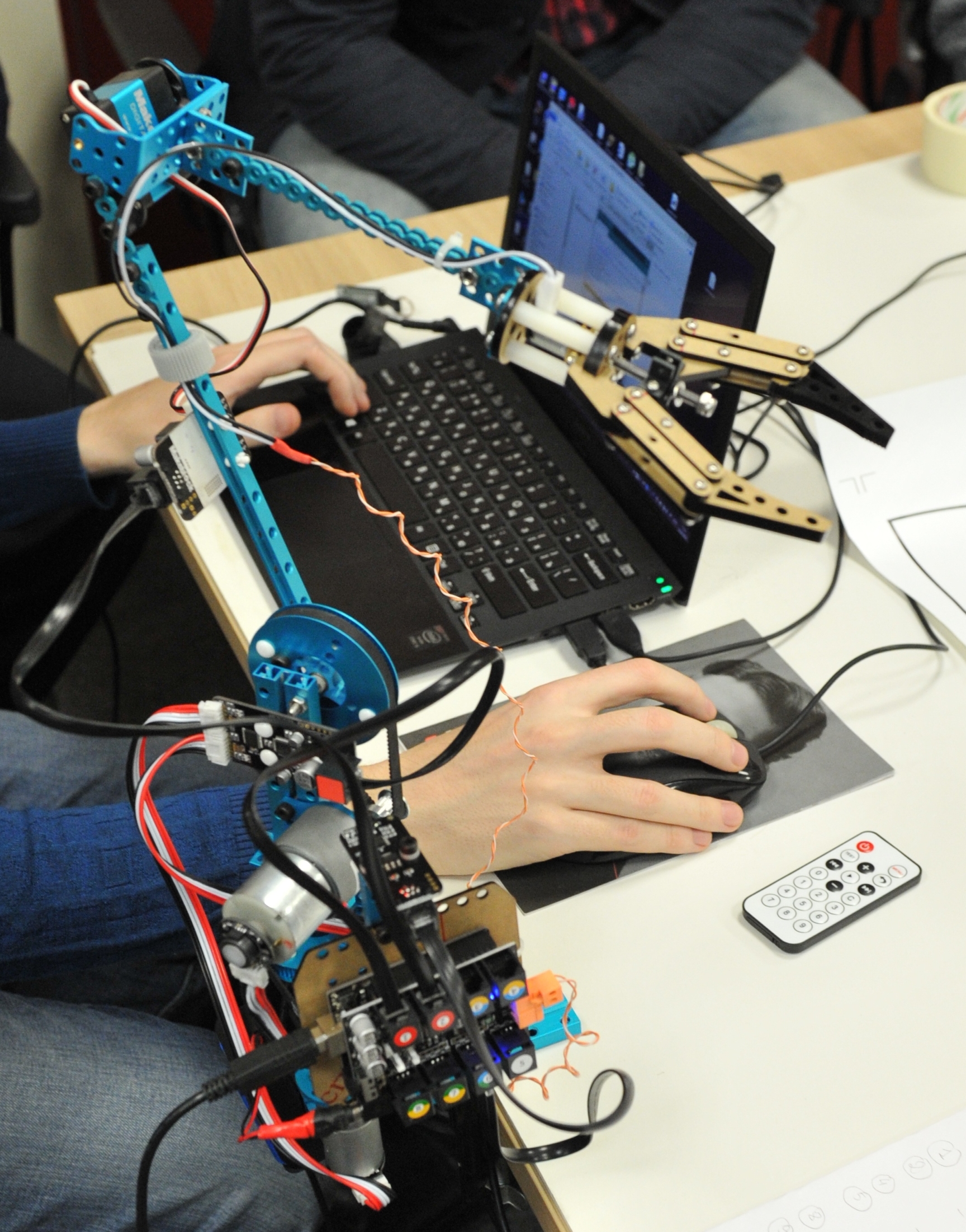
Робот-манипулятор
Творческая категория. Тема ''Электроника'' (Arduino).
- участник всероссийского этапаКоманда: GTC
Регион: Москва
Город:
Название ОУ: МГИУ
Руководитель команды: Архипов Максим Викторович
Оператор №1: Михайлов Никита
Оператор №2: Рязанцев Владимир
Дополнительные операторы: Шрейдлер Михаил
Зарегистрировал робота: Архипов Максим Викторович
|
Описание:Цель - разработать прототип манипулятора с тремя степенями свободы, который автономно реализовывал бы распознавание типовых грузов на условной лунной базе. Для перемещения грузов предусмотреть наличие захвата на конечном звене манипулятора.Принцип действия:Робот имеет три звена и схват. Все звенья – вращательные. На третьем звене находится схват.Робот включает в себя платформу, которая может стоять автономно в заданном месте, автоматически закрепляясь на грунте, также платформа может быть установлена на автономную роботизированную тележку. В манипуляторе имеются 4 мотора, что обеспечивает достаточную область работы, для поднятия грузов на борт платформы с целью дальнейшей транспортировки или исследования на месте. Алгоритм управляющей программы предусматривает управление тремя двигателями, опрос датчиков Холла и опрос датчика освещенности. Датчики Холла находится на одной оси с центром вращения первого и второго звена манипулятора. Третье звено оснащено серводвигателем. Датчик освещенности находится в просвете захватываемых деталей. Линейный двигатель схвата срабатывает при наличии в просвете заготовки. Технические характеристики:Технические характеристики робота:1. Количество степеней свободы робота – 3; 2. Приводы: серводвигатели и ДПТ; 3. Средняя скорость перемещения инструмента регулируется в диапазоне 1 – 20 мм/с; 4. Точность позиционирования – 1 мм; 5. Рабочая зона сфера радиусом - 45 мм; 6. Количество программ движения инструмента – 2 (в последующих версиях – 10); 7. Количество управляемых действий – 5; 8. Питание робота – 11 В; 9. Габариты робота без устройства крепления - 50×20 мм; 10. Вес робота без устройства крепления - 0,25 кг; 11. Управление от пульта ручного управления и USB. |