|
|
Номер команды: ТСТ-020
Робот-исследователь
Творческая категория. Тема "Роботы и космос". Старшая группа.
- участник всероссийского этапаКоманда: Mingitau
Регион: Кабардино-Балкарская Республика
Город: Нальчик
Название ОУ: ГКОУ ДОД РЦНТТУ
Руководитель команды: Бжихатлов Кантемир Чамалович
Дополнительный руководитель: Хамуков Юрий Хабижевич, Лутай Александр Михайлович, Бжихатлов Заммоев Аслан Узеирович, Кантемир Чамалович
Оператор №1: Тишков Андрей Владиславович
Оператор №2: Боттаева Диана
Дополнительные операторы: Кильчуков Артур Альбертович
Зарегистрировал робота: Тишков Андрей Владиславович

|
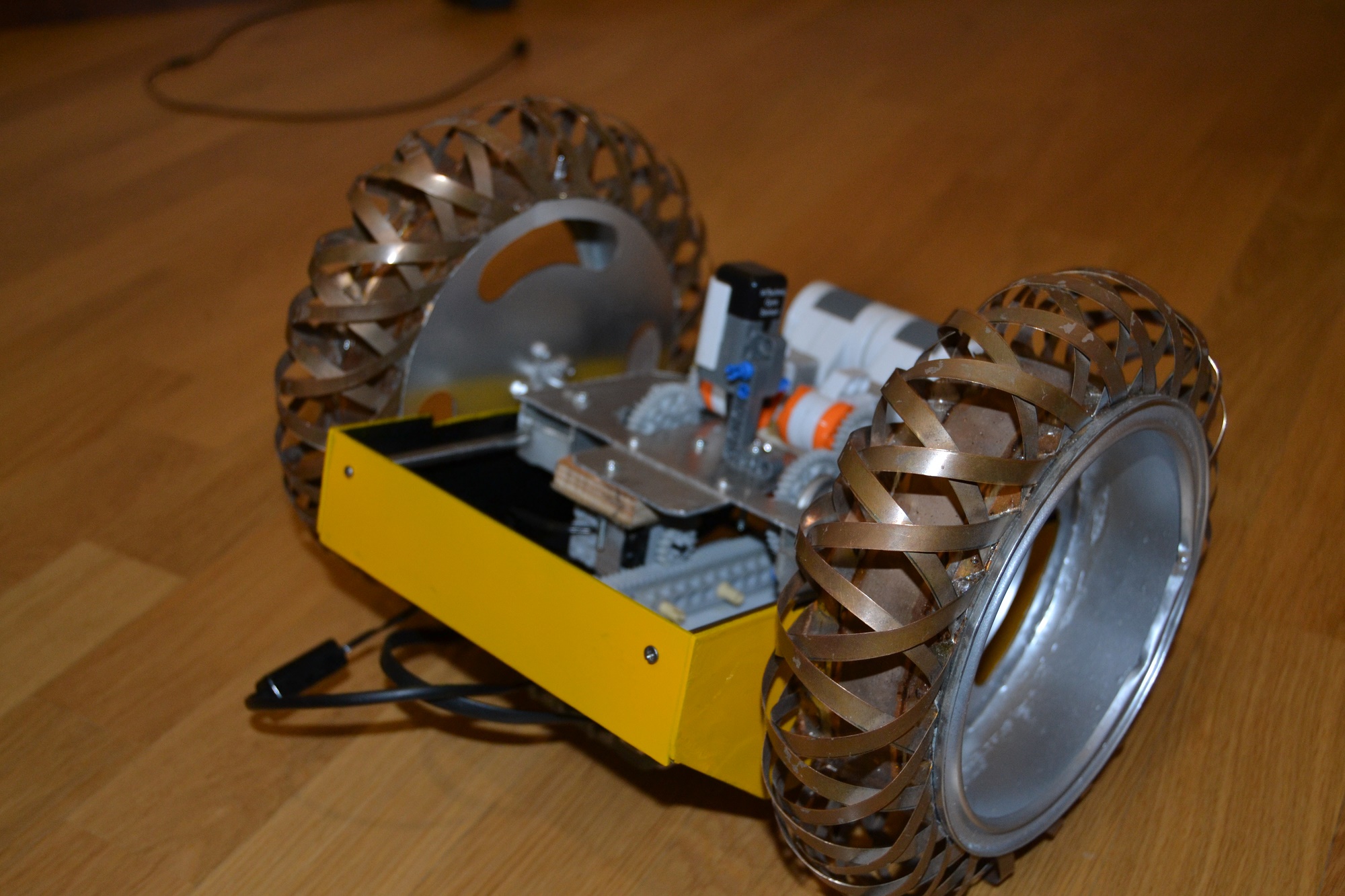
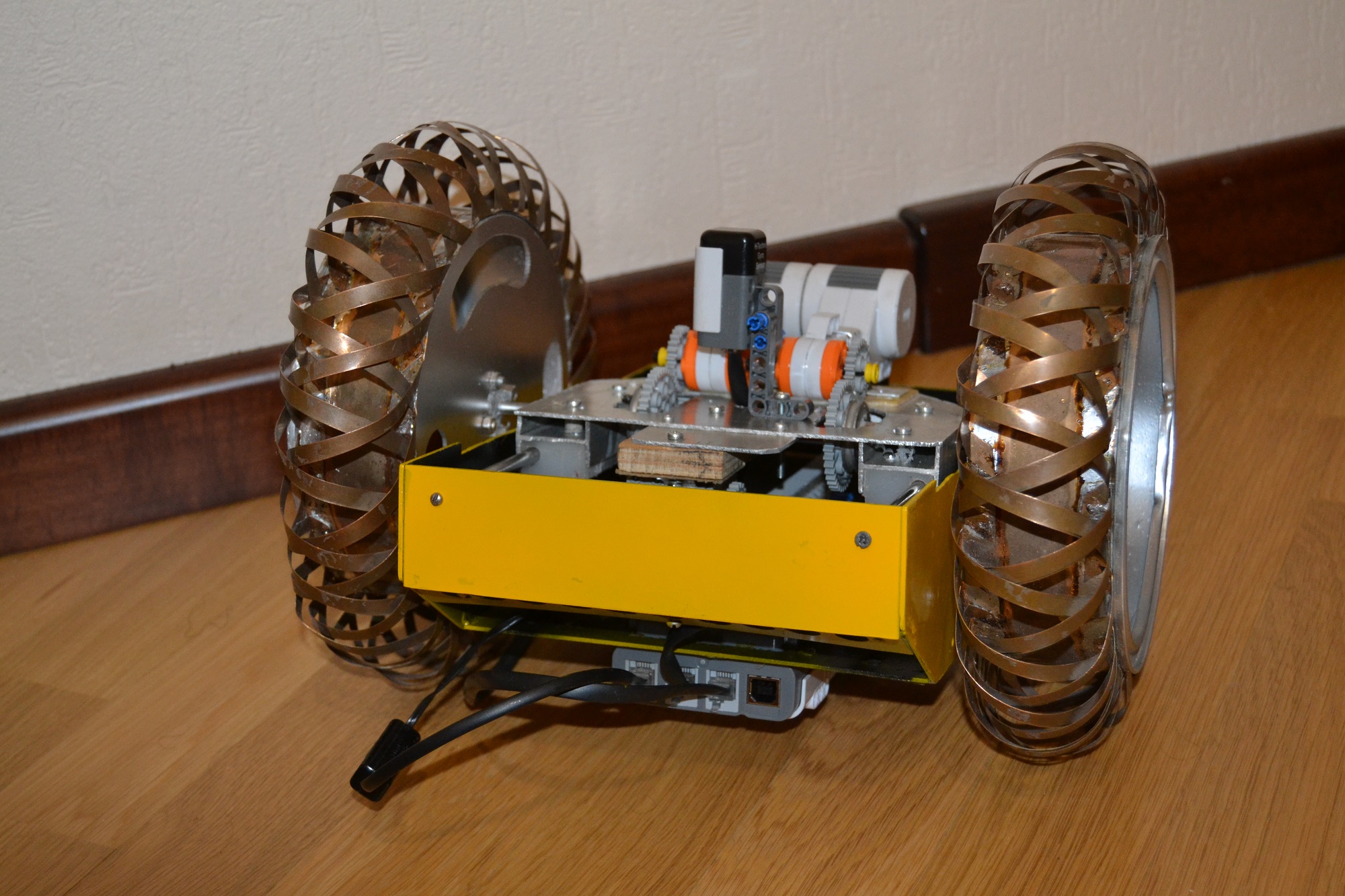
Описание:Эффективность систем автономного мобильного исследовательского робота-планетохода для космических экспедиций, предназначенных для обследования больших участков местности, лимитируется их способностью к осуществлению глобальных перемещений собственных эффекторов, то есть, мобильностью. В свою очередь, мобильность роботов определяется управляемостью, маневренностью и проходимостью транспортной платформы, на которой робот агрегатирован.В соответствии с вышеизложенным, были определены цель и задачи исследования. Целью проекта является создание модели одноосного планетохода с динамическим управлением остойчивостью кабины. Основными задачами данного проекта являются: • разработка кинематической схемы привода маршевых колес модели; • разработка конструкции привода устройства управления смещением кабины. Объектом исследования в нашей работе является одноосное транспортное средство с динамическим управлением остойчивостью. Предмет исследования – система управления остойчивостью модели одноосного планетохода. Гипотеза исследования – это возможность создания полнофункциональной модели одноосного транспортного средства с динамическим управлением с применением элементов комплекта LEGO. Результат работы - модель одноосного планетохода с динамическим управлением остойчивостью Принцип действия:Кинематическая схема конструкции модели одноосного планетохода на основе комплекта Lego.Прототипом для разработки действующей модели исследовательского планетохода на одноосном шасси был выбран оригинальный дизайн-проект одноосного марсохода с динамическим управлением остойчивостью, эллиптическими демпферными грунтозацепами движителей в «елочной» компоновке, и раскладными солнечными батареями в ступицах движителей .Этот проект в свое время был создан в Нальчике группой инициаторов-разработчиков концепции одноосных транспортных средств с динамическим управлением остойчивостью. Создаваемая модель отличается от прототипа использованием агрегатов и деталей комплекта LEGO MINDSTORMS в конструкции энергетической базы, наличием сенсорной системы, трансмиссии собственной конструкции, и также собственной конструкции дистанционной системы управления движением модели. Мы изготовили для своей конструкции движители с ленточными демпферами-грунтозацепами. Движители с ленточными демпферами-грунтозацепами выгодно отличаются от движителей существующих планетоходов традиционных компоновок . Хотя они и остаются колесными, режим взаимодействия колес большого радиуса с грунтом-подложкой существенно иной. Постоянная полная нагруженность колес и вытянутое по направлению тяги пятно контакта обуславливают самые выгодные режимы взаимодействия с подложкой. Также мы применяем сенсорную систему, комплектуемую из элементов набора LEGO MINDSTORMS. Она состоит из контроллера NXT и двух ультразвуковых датчиков. Также предполагается использование гироскопического датчика для стабилизации положения кабины. В колесных дисках движителей мы предусматриваем установку раскладных солнечных батарей для подзарядки аккумуляторов контроллера. На Марсе, помимо фотоэлектронных преобразователей, возможно использование ветроэлектрогенератора. В отличие от лунохода, панели солнечных батарей у марсохода должны быть больше по площади и убирающимися, так как Марс дальше от Солнца, на нем есть атмосфера и дуют сильные ветры. Хотя плотность марсианской атмосферы всего лишь порядка одной двухсотой плотности земной, при скорости ветров, которые там возникают, поднятая ветром пыль будет повреждать поверхности батарей, а аэродинамические эффекты на развернутых панелях могут повредить конструкцию или опрокинуть марсоход. Поэтому при возникновении ветра панели должны будут складываться, а энергия в бортовую сеть робота будет поступать от ветроэлектрогенератора. Чтобы лопасти ветрогенератора всегда вращались в одну сторону при любой ориентации марсохода относительно направления ветра, лучше укомплектовать марсоход ветроагрегатом с вертикальной осью. Микрокомпьютер NXT имеет процессор AT91SAM7S256 архитектуры ARM7, производящийся фирмой ATMEL. Это младшая модель из ряда процессоров ARM, например на ARM 11 создан всемирно известный iPhone . Технические характеристики:Размеры робота составляют : 270х300х265Наша модель робота-планетохода представляет собой одноосную самоходную тележку с динамическим управлением остойчивостью. Конструкция состоит из следующих элементов: балка с полуосями маршевых колес и элементами приводов и несущими каретками; кабина; маршевые колеса с демпферами-грунтозацепами в качестве движителей; расположенные в кабине электродвигатели приводов колес и привода механизма перемещения кабины; приемо-передающий блок дистанционного управления, модель ветроэлектрогенератора; модель солнечных батарей в ступицах движителей; два ультразвуковых датчика расстояния |