
|
|
Номер команды: ТСР-021
SpaceGuide: космический экскурсовод
Творческая категория. Тема "Роботы и космос". Средняя группа.
- участник всероссийского этапаКоманда: SpaceGuide
Регион: Пермский Край
Город: Пермь
Название ОУ: НОУ "Центр Инновационного развития человеческого потенциала и управления знаниями"
Руководитель команды: Кокшаров Павел Александрович
Оператор №1: Гагарин Александр
Оператор №2: Назаров Максим
Зарегистрировал робота: Кокшаров Павел
|
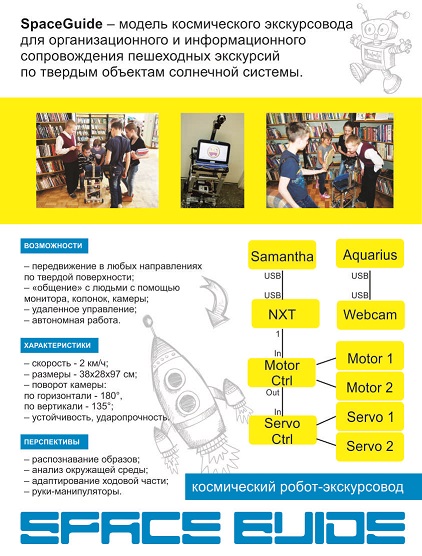
Описание:Космический туризм, находящийся пока в стадии единичных полетов и не предполагающий высадки на объектах солнечной системы, тем не менее, активно развивается. Представляется, что уже через несколько лет путешествия на космических аппаратах станут обыденностью, а через несколько десятков они будут сопровождаться прогулками по планетам и спутникам. В пользу этого предположения говорят многочисленные проекты освоения космоса, добычи полезных ископаемых в космосе, создания колоний на других планетах и т.п. Так, сегодня активно осуществляется Mars One – проект полета на Марс с основанием колонии на его поверхности.В космических туристических экспедициях использование роботов-экскурсоводов вместо людей позволит сэкономить жизненно важные ресурсы, такие как запас пищи и кислорода. Кроме того, при высадке и нахождении на другой планете, робот сможет контролировать безопасность, предотвращать проблемные ситуации путем сканирования пространства, давать рекомендации туристам, обеспечивать срочный возврат людей на космический корабль, оказывать медицинскую помощь и т.п. Ну и конечно такой робот сможет осуществлять функции обычного экскурсовода – рассказывать об объекте, его особенностях и достопримечательностях. Необходимым качеством такого робота является возможность работы как в автономном режиме, так и в режиме удаленного управления (с космического аппарата и с Земли). Кроме того, робот-экскурсовод может быть использован в качестве сопровождающего астронавтов, выполняющих высадку на другие планеты с нетуристическими, а научными целями. Принцип действия:В настоящее время робот транслирует речь оператора и передает оператору речь собеседников. Далее будет реализовано общение без участия оператора.Робот снабжен монитором и камерой. Камера считывает картинку и речь и передает оператору. Камера установлена на вращающейся платформе с независимым управлением – т.е. робот может ехать вперед, а камера в это время крутиться. Сканирование пространства камерой – важный элемент робота, на этой основе могут быть распознаны различные объекты в пространстве, предотвращены неприятности во время экскурсии. Для вращения платформы с камерой используется два сервопривода. Монитор может транслировать различные картинки или «лицо» робота, передавая «эмоции» – улыбку, грусть и т.п. Это реализуется на основе библиотеки картинок с изображением эмоций. В настоящее время SpaceGuide реализовано удаленное управление оператором по локальной сети или Интернету. Управление движением осуществляется с помощью джойстика Logitech, подключенного к компьютеру. Оператор постоянно получает аудио и видео трансляцию с камеры, а также может передавать свою звуковую информацию для воспроизведения ее роботом. Аудио, графика и видео в обоих направлениях (к роботу и от робота) передаются с помощью программы Skype. Технические характеристики:Сверху тележки крепится ноутбук Aquarius, который визуально выполняет функции «головы» и «лица» робота. Монитор ноутбука транслирует «эмоции» робота и дополнительную информацию о достопримечательностях. Ноутбук управляет также аудио и видео-обменом.На конструкции закреплена платформа с камерой Sven. Платформа имеет два сервомотора TETRIX для вращения ею на 180о влево и вправо, а также вверх и вниз. Камера считывает и передает изображение местности оператору. Также может быть осуществлена автоматизированная обработка изображения. Для обмена данными с компьютером оператора используется Wi-Fi-модуль Samantha. В данный момент робот питается от батарей на 12V (батарея TETRIX) и 9V (батарея NXT). Общий размер конструкции (Д*Ш*В) 38*28*97. Скорость движения 2 км/ч. |


