|
|
Номер команды: ТСТ-010
SpaceBot
Творческая категория. Тема "Роботы и космос". Старшая группа.
- участник всероссийского этапаКоманда: ФМЛ 239
Регион: Санкт-Петербург
Город: Санкт-Петербург
Название ОУ: ГБОУ Президентский ФМЛ №239
Руководитель команды: Лосицкий Игорь Александрович
Дополнительный руководитель: Филиппов Сергей Александрович, Федяев Александр Николаевич
Оператор №1: Погосов Левон
Оператор №2: Лосицкий Евгений
Дополнительные операторы: Сорокин Илья, Свечинский Андрей
Дополнительная информация: ++
Зарегистрировал робота: Филиппов Сергей Александрович
|
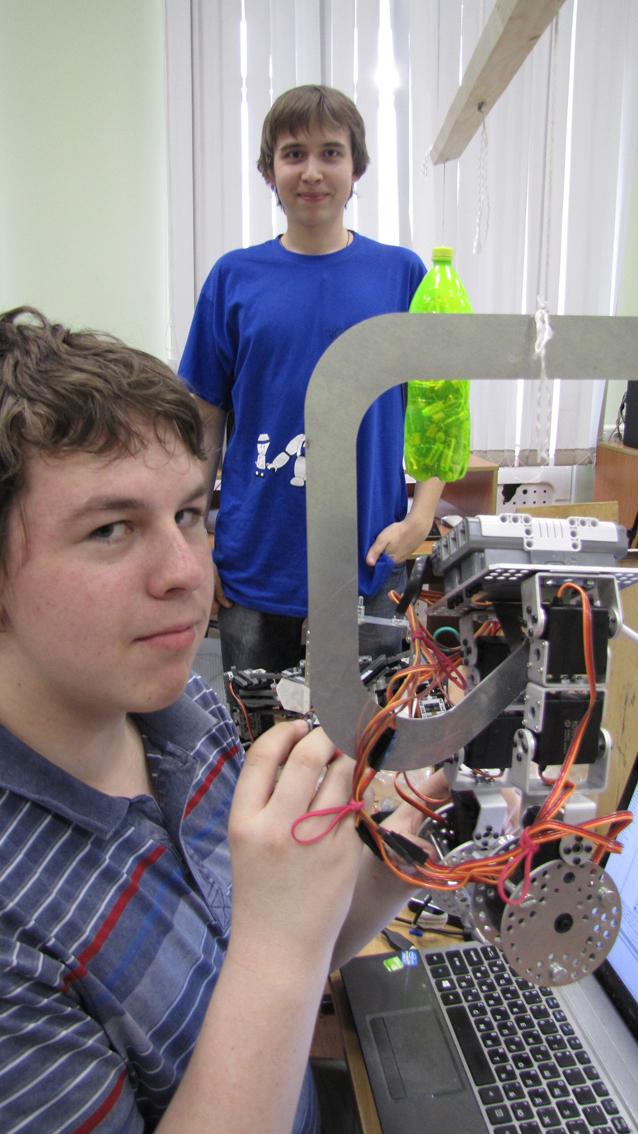
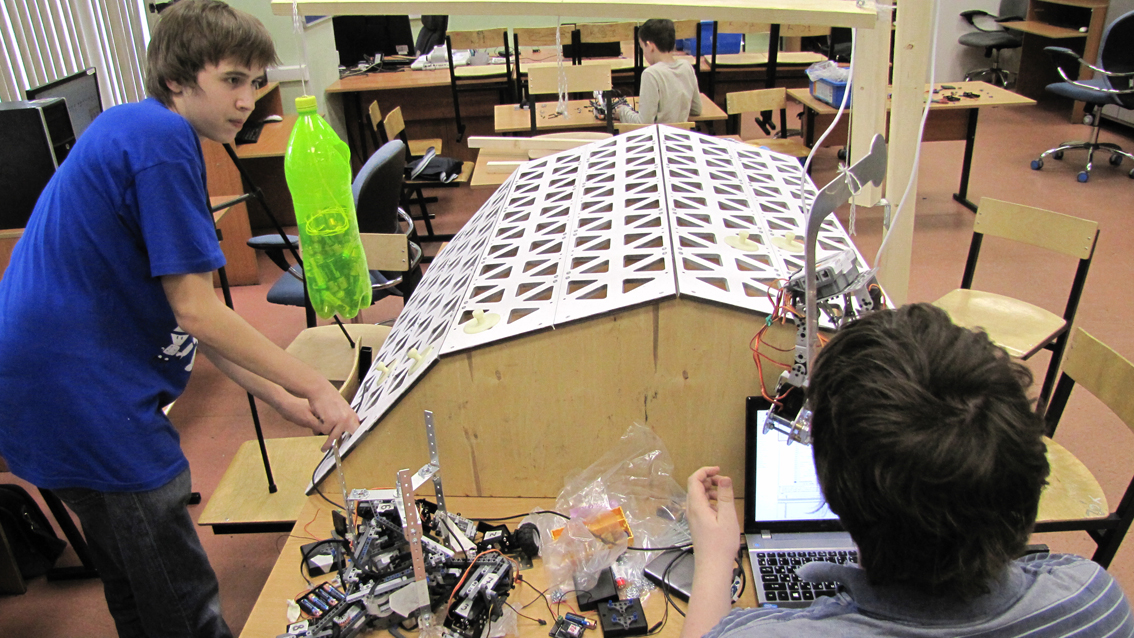
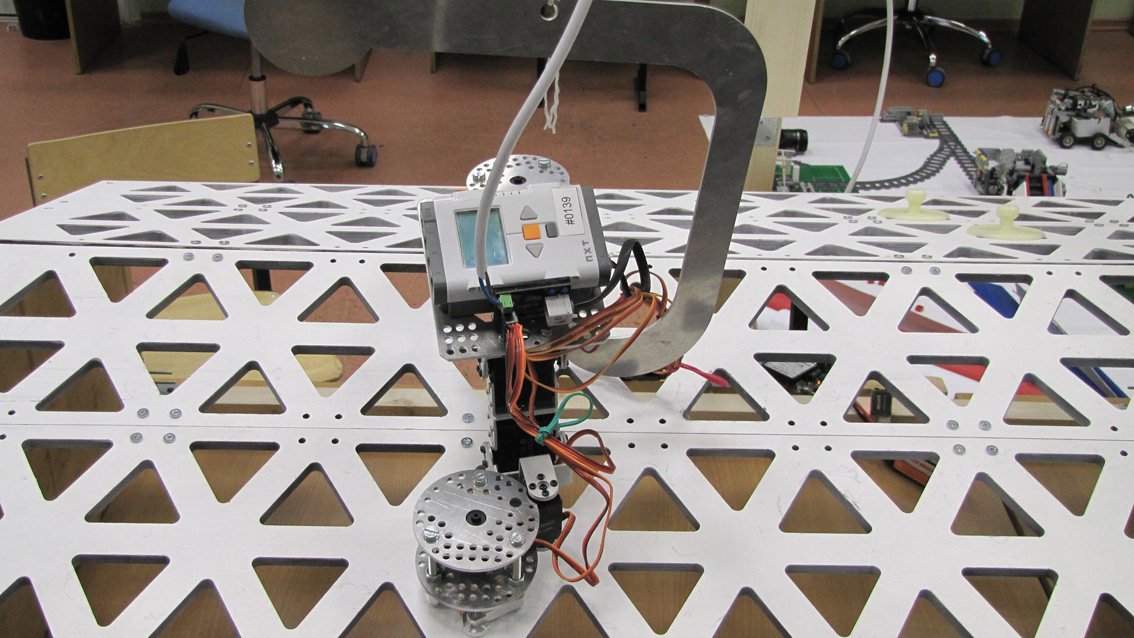
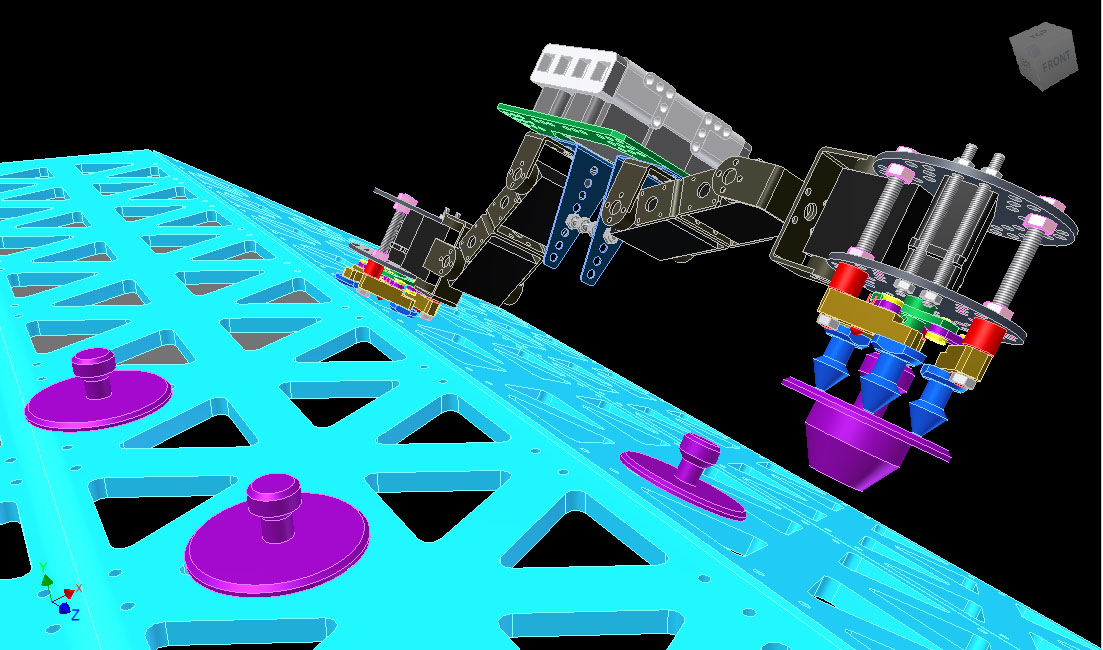
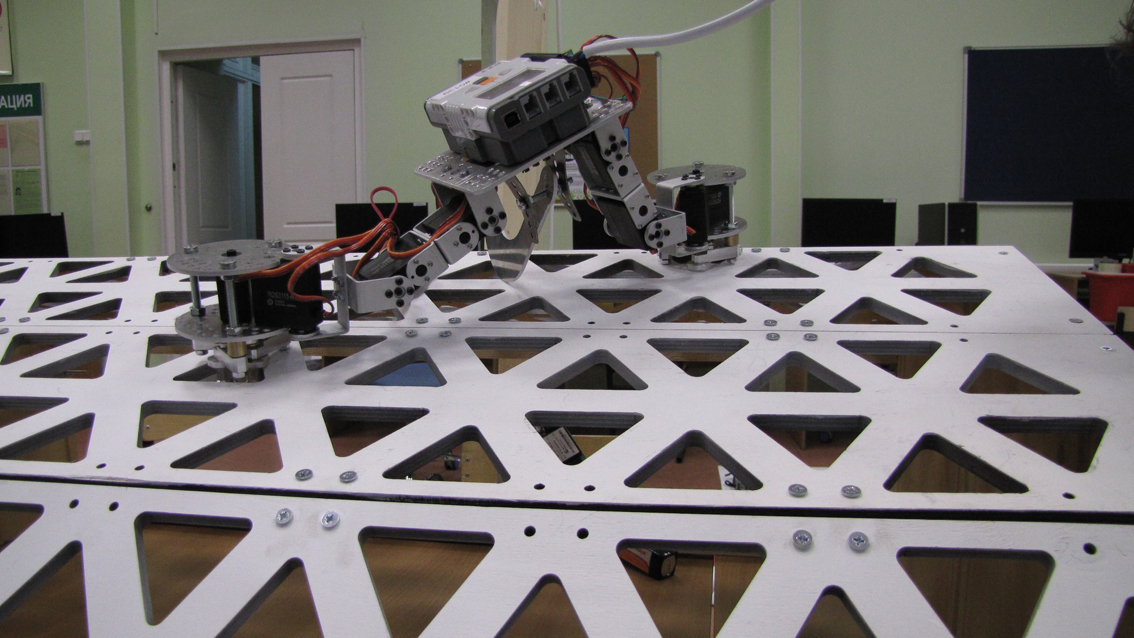
Описание:Предлагается решение двух задач:1. Создание космического робота-манипулятора и предложение варианта перемещения его по поверхности орбитальной станции или межпланетного корабля. 2. Создание системы обезвешивания для испытания такого робота в условиях земной гравитации. Принцип действия:Робот включает в себя два манипулятора для передвижения по поверхности станции. Поверхность станции имеет специальные треугольные отверстия для хорошего сцепления робота. Манипулятор имеет три степени свободы. Также на конце каждого манипулятора предусмотрен захват-фиксатор.При выполнении работ по замене/ремонту модулей на станции робот фиксируется с помощью одного манипулятора и работает вторым. Технические характеристики:Робот управляется контроллером Lego NXT |