|
|
Номер команды: ТСТ-007
lego Monsters
Творческая категория. Тема "Роботы и космос". Старшая группа.
- участник всероссийского этапаКоманда: Lego Monsters
Регион: Челябинская Область
Город: Челябинск
Название ОУ: Муниципальное автономное учреждение образования детей Дворец пионеров и школьников им.Н.К.Крупской (МАУДОД ДПШ)
Руководитель команды: Коломиец Павел Сергеевич
Дополнительный руководитель: Пономарёва Любовь Георгиевна
Оператор №1: Мельничук Артем Александрович
Оператор №2: Галка Алексей Анатольевич
Зарегистрировал робота: Мельничук Артем Александрович

|
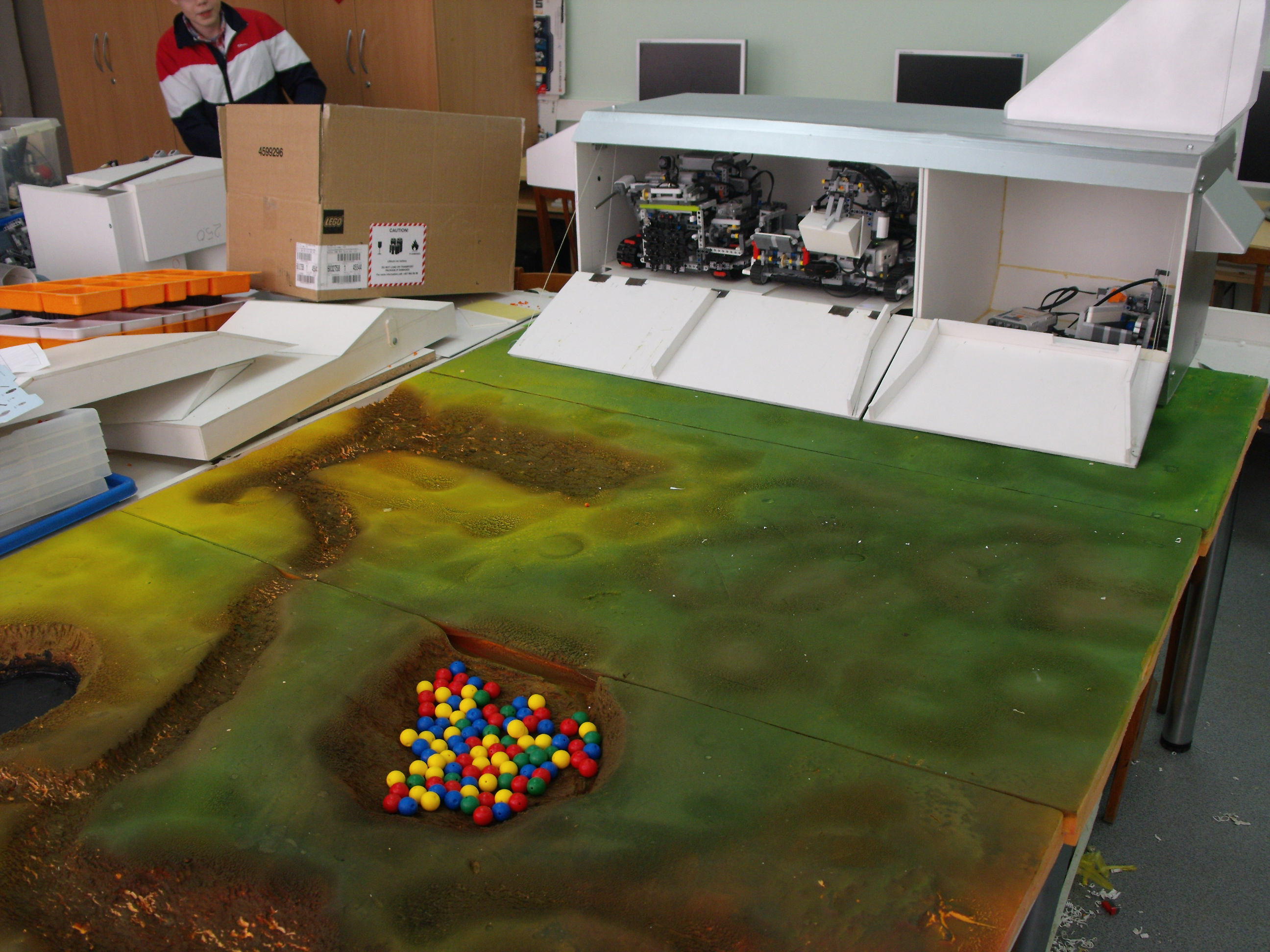
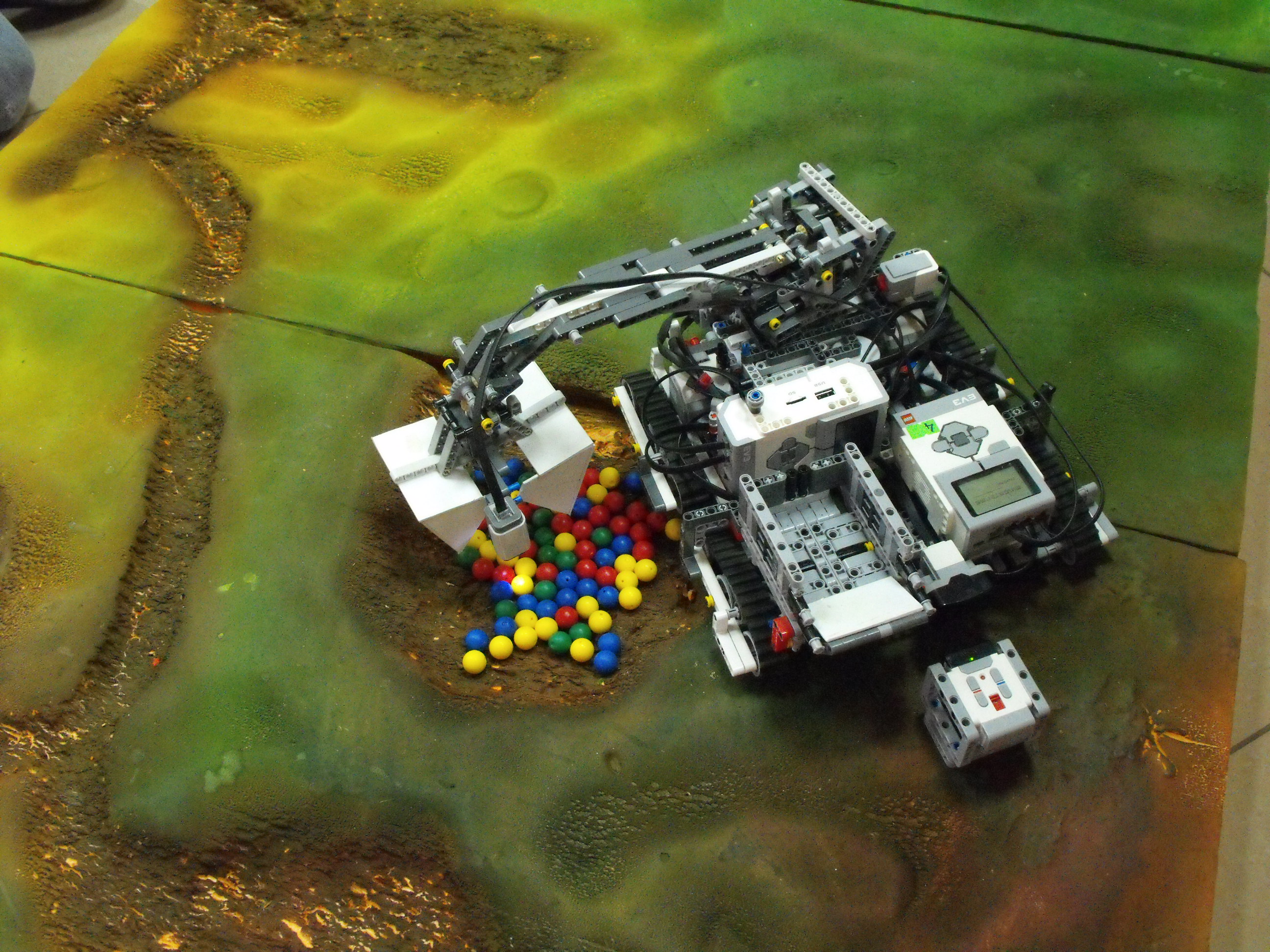
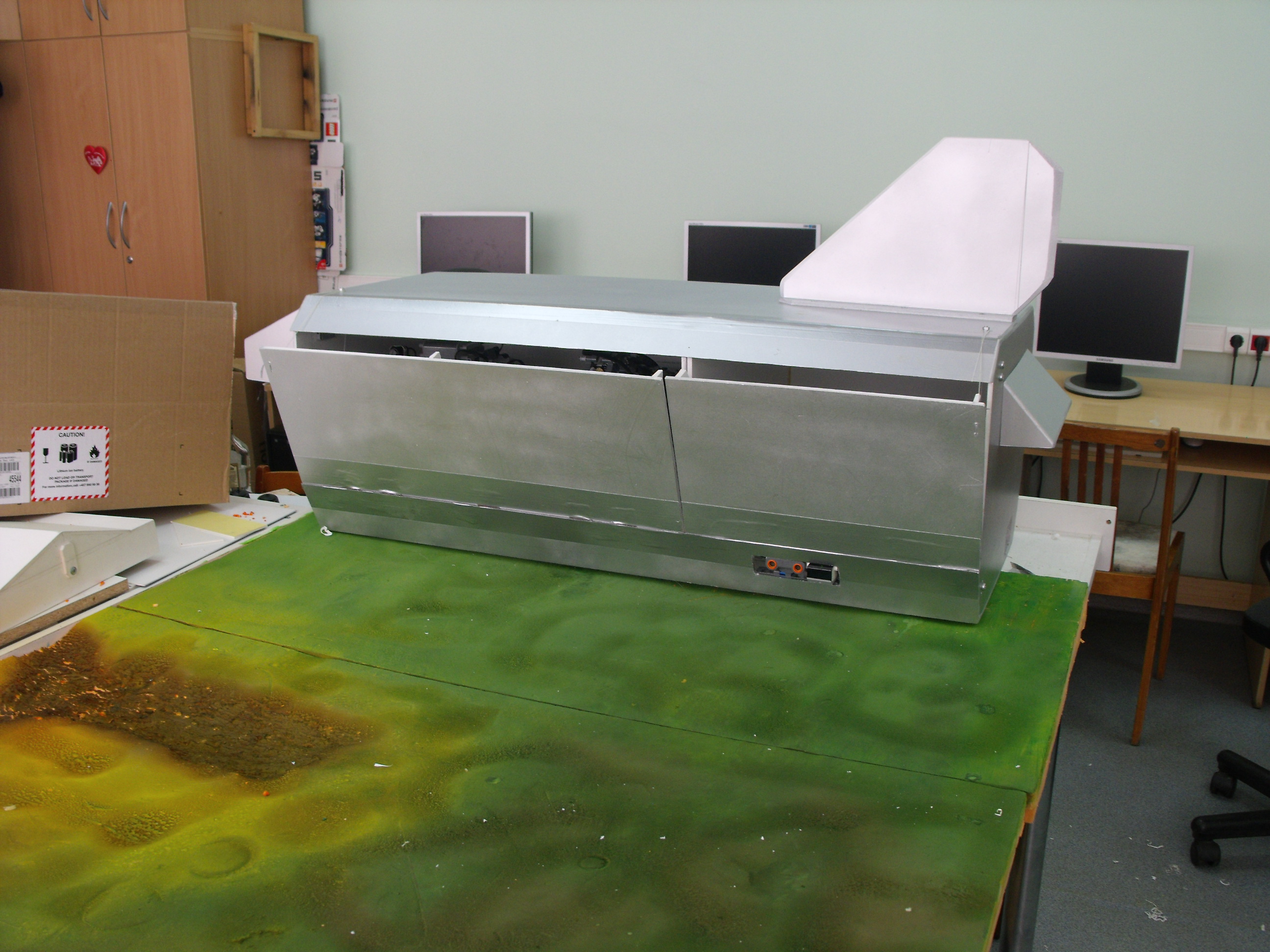
Описание:Мы задумались над тем, что в будущем, лет через 50, в солнечной системе не останется не изученных планет и спутников. Человечество настигнет проблема нехватки воды и еды, а также различных полезных ископаемых. И поэтому решили создать проект, который бы решил эту проблему.К планетам потенциально пригодным для жизни будут отправлен большой исследовательский корабль Багратион, несущий на борту спускаемые и дистанционно управляемые разведывательные шаттлы. На каждую планету будет отправлено несколько таких шаттлов для исследования условий обитания планеты и ее ресурсов. Принцип действия:Модель спускаемого шаттла состоит из двух отсеков. В первом находится ангар для двух робот: разведчика и горнодобывающей платформы, а во втором рудо обрабатывающий завод. Управление шатлом осуществляется удаленно с борта корабля Багратион. Запуск всех роботов и шлюзов производится с помощью пульта. Это блок NXT c 4 датчиками касания, который соединен с другими блоками NXT, при помощи bluetooth связи. Пульт, удаленно по нажатию датчика касания, запускает программы на блоках NXT. Таким образом мы реализовали дистанционное открытие и закрытие шлюзов, запуск завода и горнодобывающей платформы. Программа, осуществляющая этот процесс, написана с помощью среды программирования Bricx Command Center. Эта единственная среда программировании для NXT, которая позволяет запускать удаленно целые программы, а не отдельные ее части. Работа шаттла начинается с открытия шлюзов. Первым в работу включается разведчик. Он снабжен камерой для дистанционного управления и различными датчиками для исследования планеты. Сделав разведку местности и произведя все замеры, оператор может установить ик маяк рядом с месторождением полезных руд. Этот маяк служит ориентиром для второго робота-горнодобывающей платформы. Выполнив эту задачу оператор может отправить разведчика в шаттл или же продолжить исследование планеты. Затем оператор может запустить горнодобывающую платформу. Она снабжена ковшом со стрелой которая может вращаться на 360 градусов и кузовом для руды. Ориентируясь на ик маяк робот доезжает до месторождения и начинает добычу породы. После этого он возвращается в шаттл и выгружает собранную руду на конвейер рудо обрабатывающего завода, тот же сортирует пустую породу от руды и собирает ее в отдельной контейнер. После этого горнодобывающая платформа возвращается в шаттл и может повторить процесс заново. Если на планете ни оказалось полезных ресурсов и она не пригодна для жизни шаттл возвращается на главный корабль.Технические характеристики:Для нашего проекта мы задействовали 5 блоков NXT 2 блока EV3, 15 сервомоторов, 2 датчика касания датчик температуры, цвета и ик датчик. |