|
|
Номер команды: ТСТ-005
The Gardeners
Творческая категория. Тема "Роботы и космос". Старшая группа.
- участник всероссийского этапаКоманда: EMgroup
Регион: Курганская Область
Город: Шадринск
Название ОУ: МКОУ "Лицей №1" г.Шадринска
Руководитель команды: Бельков Валерий Юрьевич
Оператор №1: Белов Евгений
Оператор №2: Костылев Даниил
Зарегистрировал робота: Бельков Валерий Юрьевич

|
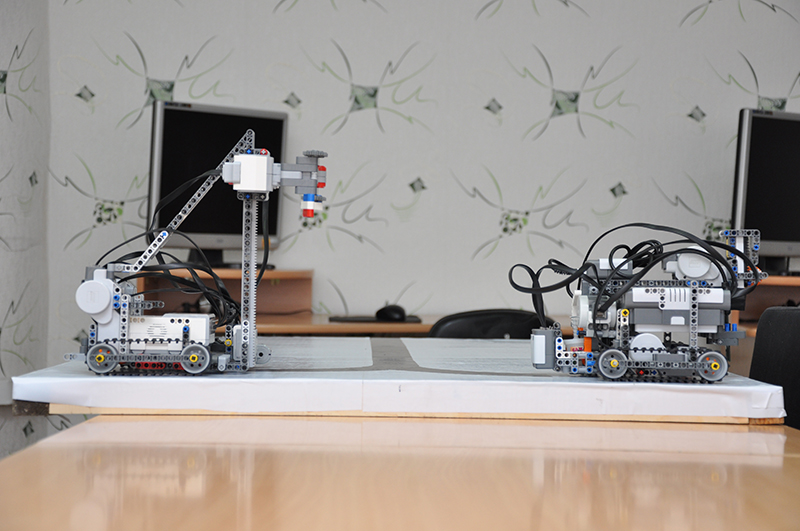
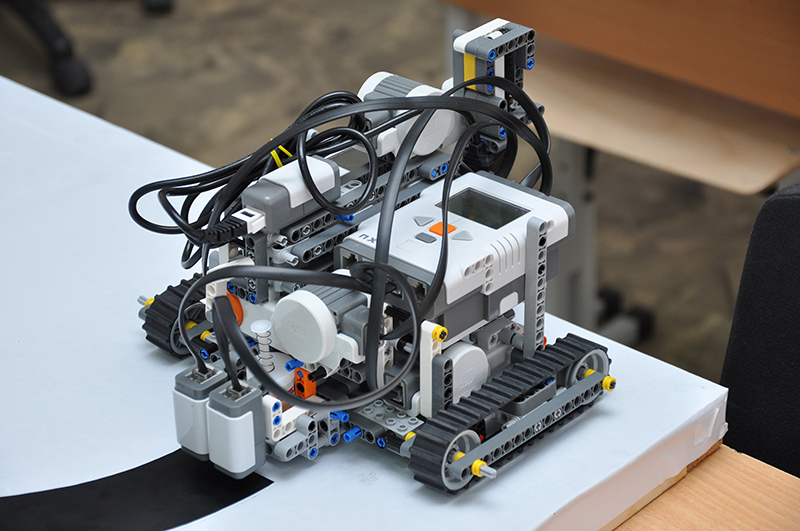
Описание:Цель проектаСоздание роботов, которые могут автоматически выращивать растительные культуры в условиях космоса. Задачи проекта Моделирование процесса автоматического выращивания растительных культур и их уборки с помощью Lego Mindstoms NXT и EV3. Принцип действия:После запуска программы робот-«фермер» начинает двигаться по линии в сторону грядок, впоследствии совершает посадку семян с помощью специального модуля для посадки и после этого он возвращается в гараж. Затем этот же робот снова начинает двигаться по линии в сторону грядок, но уже попутно измеряя влажность почвы. Если почва достаточно влажная, то он продолжает двигаться дальше, а если почва не достаточно влажная, то робот производит полив. Далее робот-«сборщик» выдвигается по линии в сторону грядок для сборки урожая. Как только робот вытащил морковку, он начинает двигаться на базу для того, чтобы положить морковку в склад. Это действие робот выполняет до того момента, пока не соберёт весь урожай.Технические характеристики:Главные объекты проекта: 2 робота – «садовода».Технические модели реализованы на базе микропроцессоров NXT 2.0 и EV3. В модели робота-фермера использованы: • 5 интерактивных сервомотора NXT • 2 датчика цвета из набора NXT • 2 микропроцессора NXT 2.0 • 1 датчик влажности почвы Vernier В модели робота- сборщика использованы: • 3 интерактивных сервомотора NXT • 1 маленький интерактивный сервомотор EV3 • 1 датчик освещённости из набора NXT • 1 датчик света из набора EV3 • 2 микропроцессора NXT 2.0 • 1 датчик влажности почвы Vernier |