
|
|
ОБОРУДОВАНИЕ
Перечень возможных деталей и комплектующих (предлагаемая комплектация)
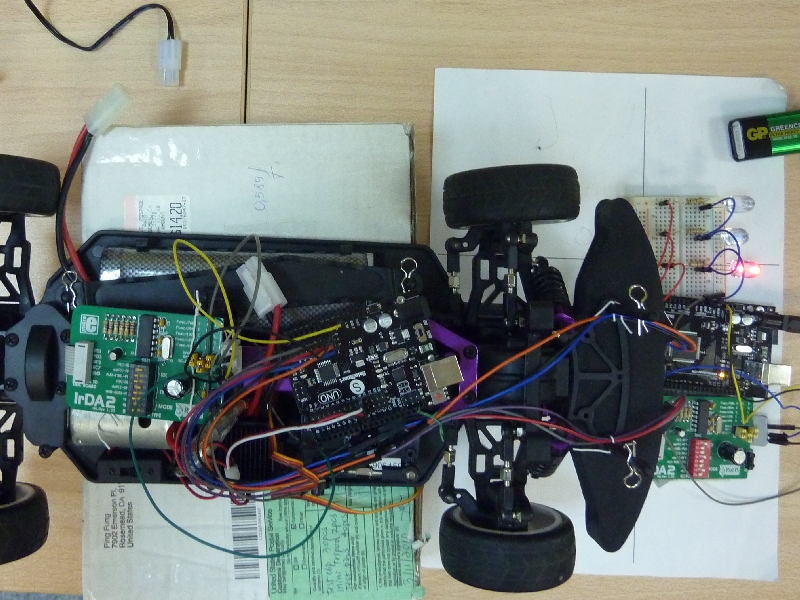
Транспортное средство (первый "рабочий" вариант ниже)
|
Описание комплектующих. |
Количество |
Комментарий |
|
Шасси и кузов от готовой радиоуправляемой модели. |
1 шт. |
HSP 94103 или другая модель масштаба 1:10. Необходимо обратить внимание, чтобы приёмник, рулевой серводвигатель и регулятор оборотов не были выполнены, как одно устройство. Целесообразно уменьшить скорость модели путём замены ходового электродвигателя двигателем с меньшим количеством об/мин (540 типоразмер; 50T, 55T, 60T, 65T или аналогичный) или изменением Кпер трансмиссии – замена штатных шестерёнок (26z/58z) на другие: 23/64, 19/64 и т.п. В качестве ходового регулятора может быть использован штатный регулятор скорости (работает с библиотекой Servo Arduino), но со штатным «быстрым» мотором (27T) трудно получить необходимую «медленную» скорость для передвижения по модели городского движения.. |
|
Микроконтроллер Arduino MEGA2560 |
1 шт. |
http://amperka.ru/collection/arduino/product/arduino-mega-2560 Желательно использовать МК, позволяющий подключать необходимое количество датчиков напрямую и имеющий не менее двух физических портов UART. |
|
Sensor shield для Arduino MEGA |
1 шт. |
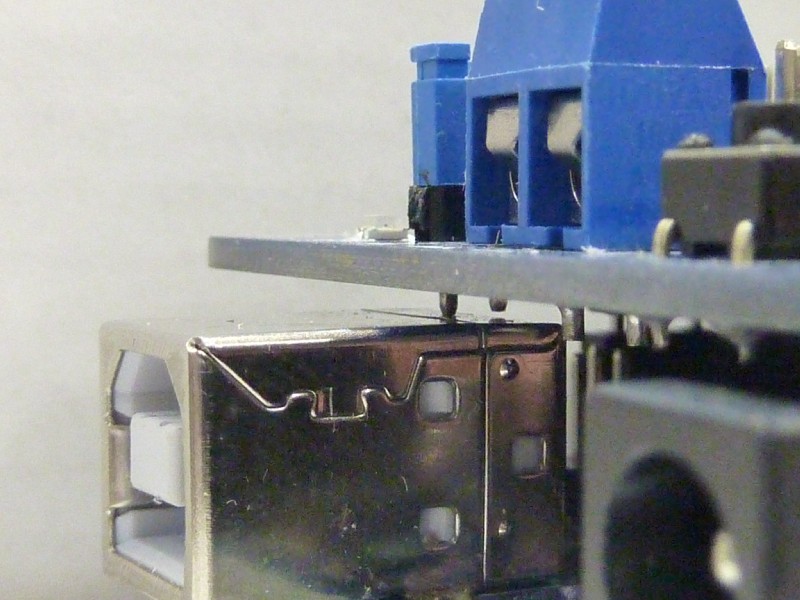
http://amperka.ru/collection/arduino-shield/product/arduino-mega-io-shield Желательно использовать специализированный шилд ввода-вывода для подключения большого кол-ва датчиков. Обратить внимание. На некоторых шилдах неправильно установлен джампер питания. Выводы джампера со стороны пайки могут (при установке на основную плату Arduino) касаться корпуса USB-порта платы Arduino, что приведёт к К.З. Необходимо проложить плотный изоляционный материал, откусить или опилить. |
|
Motor Shield на L298 |
1 шт. |
http://amperka.ru/product/arduino-motor-shield Комментарий будет добавлен. |
|
Датчики линии (двухкомпонентные – излучатель и приёмник) |
Минимум – 3 шт. |
http://amperka.ru/product/analog-line-sensor Для следования вдоль линии желательно установить на ТС не менее двух датчиков, но и в этом случае ТС может не суметь двигаться по своей «полосе движения», а также может быть сильно подвержено влиянию случайных причин (изменения внешней освещённости, неровности поля и т.п.), которые будет трудно обработать программно. |
|
Датчик расстояния (10-80 см) |
3 шт. Минимум – 1 шт. |
Инфракрасный датчик Sharp GP2Y0A021 С одним датчиком (стационарно установленным) будет невозможно обнаружить приближение другого ТС сбоку. |
|
Инфракрасный приёмо-передатчик данных, работающий по протоколу IrDA SIR (скорость передачи данных 115.2 Kbod). |
1 шт. |
IrDA2 click Возможно, придётся перепаять до 3 перемычек – две для аппаратной установки* скорости передачи/приёма, одну на питании**. Перемычка представляет собой сопротивление R=0. Проще, удалив перемычку, впаять проволочку. * – Перемычки по умолчанию установлены в положение (9600 bod), позволяющее изменять скорость передачи/приёма программно (однако полученные платы пришли распаянными на 115200 бод). ** – Необязательно (см. схему). |
|
Второй, запасной ходовой аккумулятор для ТС |
1 шт. |
На соревнованиях может не хватить времени зарядить разрядившийся аккумулятор. |
|
«Быстрая» зарядка для ходового аккумулятора ТС |
1 шт. |
Необходима только на соревнованиях. |
|
Провода для подключения датчиков, ИК-устройств, серводвигателей и пр. (одно-, двух-, трёх-проводные) |
~12-15 шт (30 см) |
http://amperka.ru/collection/cables-wires Кол-во и длина зависит от вида датчиков, их кол-ва и расположения плат на шасси ТС. Необходимо обратить внимание на концы проводов – могут быть в сочетаниях: вилка-вилка, вилка-розетка, розетка-розетка. |
|
Инструмент для сборки-разборки и регулировки узлов шасси |
http://www.rccarshop.ru/catalog/?sid=17&id=1288 В данном наборе нет ключей для регулировки положения колёс и рулевого управления. Также надо отметить, что при малой длине отвёрток (http://www.rccarshop.ru/catalog/?sid=17&id=1286) трудно дотянуться до винтов крепления мотора. Необходимо обратить внимание на соответствие приобретаемого инструмента и модели, т.к. инструмент выпускается в метрическом и дюймовом вариантах. |
|
|
Материалы для изготовления конструктивных элементов крепления плат с МК, датчиков и др. Крепёж: гайки, винты, хомуты и т.п. |
Зависит от используемых МК, датчиков и конструктивных решений. |
{kind=link}
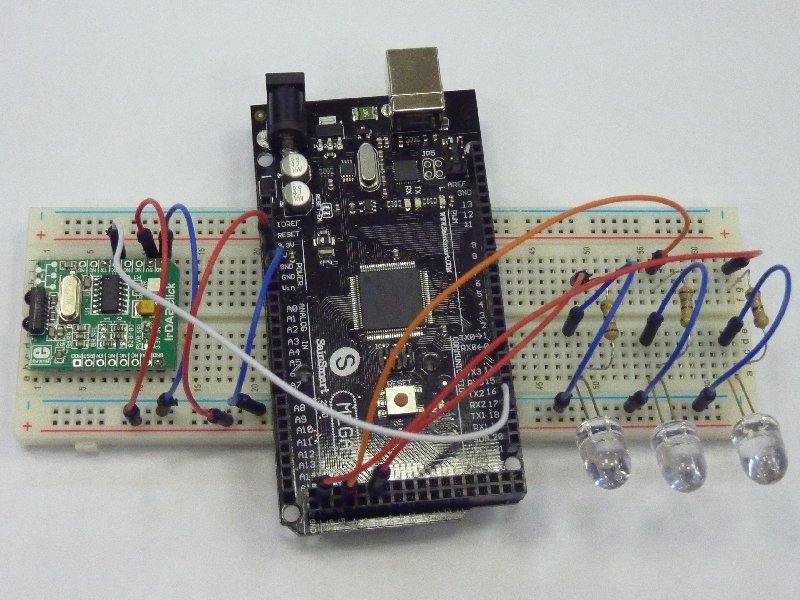
Светофор, дорожный знак (первый "рабочий" вариант ниже)
|
Описание комплектующих |
Количество |
Комментарий |
|
Arduino Uno |
1 шт. |
http://amperka.ru/collection/arduino/product/arduino-uno Т.к. у Arduino Uno только один физический порт UART, в процессе отладки программы возможны конфликты между USB-подключением к компьютеру и ИК-устройством, работающим с тем же портом UART. |
|
Инфракрасный приёмо-передатчик данных, работающий с протоколом IrDA SIR (скорость передачи данных 115.2 Kbod). |
1 шт. |
IrDA2 click Возможно, придётся перепаять до 3 перемычек – две для аппаратной установки* скорости передачи/приёма, одну на питании**. Перемычка представляет собой сопротивление R=0. Проще, удалив перемычку, впаять проволочку. * – Перемычки по умолчанию установлены в положение (9600 bod), позволяющее изменять скорость передачи/приёма программно (однако полученные платы пришли распаянными на 115200 bod). ** – Необязательно (см. схему). |
|
Светодиоды 3-х цветов (красный, жёлтый, зелёный) |
3 шт. |
Только для светофора. Практически любые. |
|
Резистор |
3 шт. |
Только для светофора. Для ограничения тока через светодиоды и МК. Величина зависит от максимального тока выходов МК, светодиодов и необходимой яркости свечения. |
|
Макетная плата |
1 шт. |
http://amperka.ru/collection/proto Для установки светодиодов, резисторов, ИК-приёмо-передатчика. |
|
Провода для соединения светодиодов, резисторов и ИК-приёмо-передатчика (однопроводные) |
~ 15 шт. |
http://amperka.ru/collection/cables-wires Необходимо обратить внимание на концы проводов – могут быть в сочетаниях: вилка-вилка, вилка-розетка, розетка-розетка. |
|
Батарейка или аккумулятор или блок питания (220 в.) на 7-9 в. |
1 шт. |
Для питания модели светофора. |
| Провод для подключения батарейки или аккумулятора к Arduino | 1 шт. |
Зависит от типа источника. Для Кроны – http://amperka.ru/collection/cables-wires/product/krona-21mm-cable |
Рекомендации по комплектующим
Среда программирования – Arduino IDE.
Алгоритм движения: следование по линии – два ф/датчика, простой Параметрический регулятор, исполнение предписаний сигналов светофора (Красный – остановка, Жёлтый – притормаживание).
Возможность использования встроенного в электронный регулятор скорости (ESC) р/управляемой модели HSP стабилизатора напряжения (BEC) для питания Arduino (без использования собственного стабилизатора Arduino).
Работоспособность штатного регулятора скорости р/управляемой модели HSP с Arduino и библиотекой управления сервоприводами – Servo Arduino.
Работоспособность Motor Shield на L298 (стандартный ШИМ Arduino (analogWrite()) с разными электромоторами.
Совместимость ИК-приёмо-передатчика IrDA2 Click от MikroElektronika с Arduino.
* – Возможность использования комплектующих признанных ниже, как малопригодные, с более сложными алгоритмами (ПИ-, ПИД-регулятор; быстрый ШИМ и т.п.), способами управления и конструктивными решениями не проводилась.
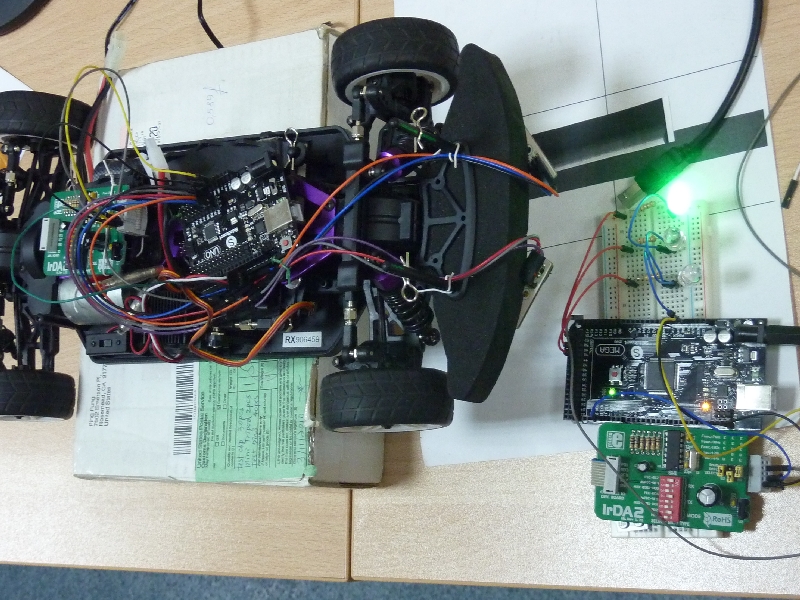
В первую очередь надо отметить, что "железо" начинает работать сразу, если, конечно, проводочки правильно подключить.
Во вторых – МК выполняет только то, что ему сказали сделать, а не то, что нам бы хотелось.
 Мотор штатный – 540/27Т.
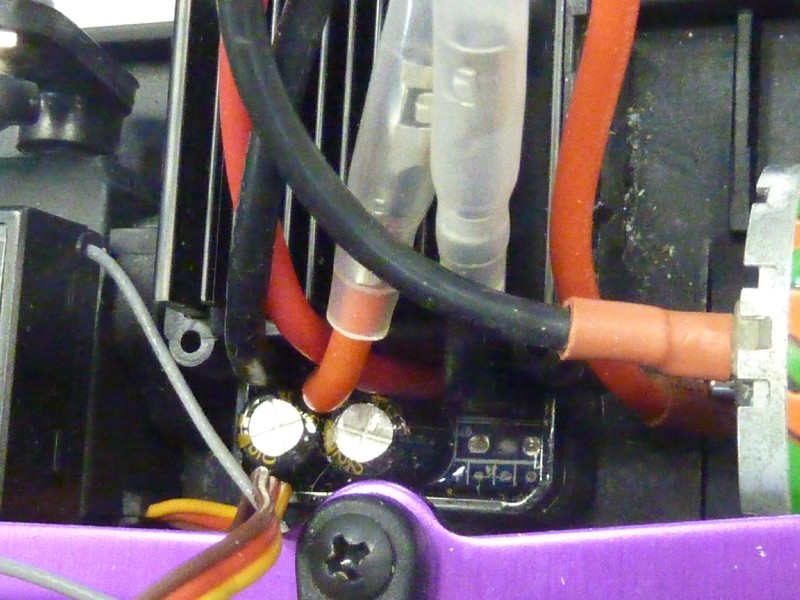
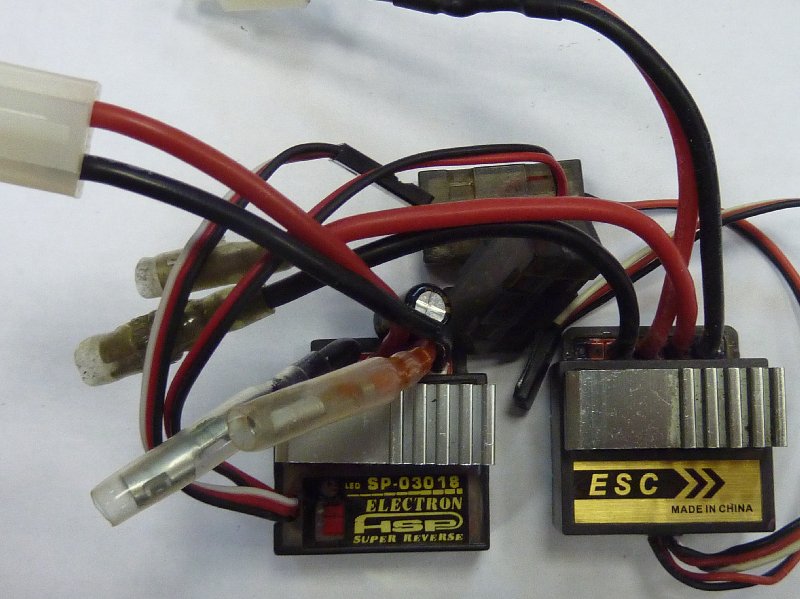
Регулятор скорости (ESC) – NoName (был установлен взамен "подгоревшего" штатного). →
Аналоговые датчики линии от Амперки (настройка чувствительности регулятором датчика не проводилась, использовались программные средства).
ИК-приёмо-передатчики на ТС и модели светофора – IrDA2 Board от MikroElektronika.
Библиотека управления сервоприводами – Servo.
Питание Arduino от BEC ESC.
Мотор штатный – 540/27Т.
Регулятор скорости (ESC) – NoName (был установлен взамен "подгоревшего" штатного). →
Аналоговые датчики линии от Амперки (настройка чувствительности регулятором датчика не проводилась, использовались программные средства).
ИК-приёмо-передатчики на ТС и модели светофора – IrDA2 Board от MikroElektronika.
Библиотека управления сервоприводами – Servo.
Питание Arduino от BEC ESC.
(Внимание! Для соревнований RoboTraffic IrDA2 Board использовать нельзя, т.к. он не может работать на скорости 115,2 Кбод.)
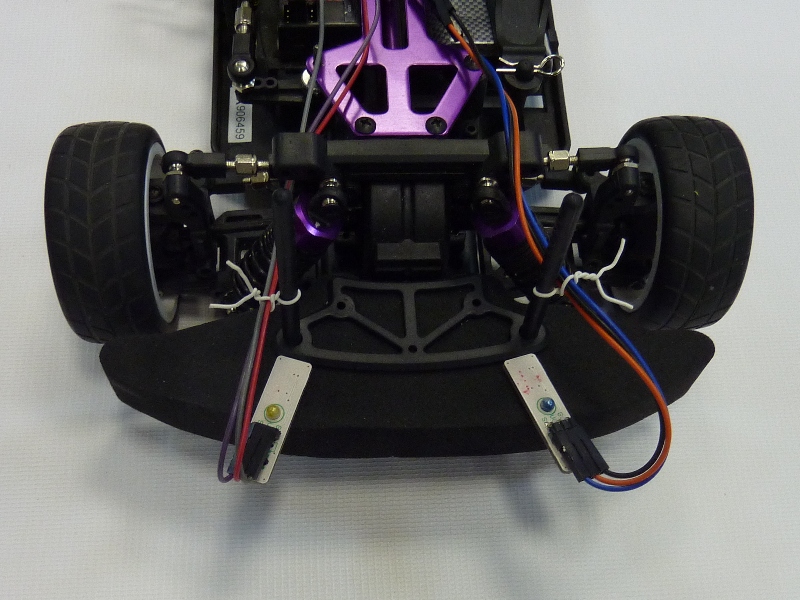
Заставить модель двигаться по линии, можно сказать, что не удалось – постоянно слетает с линии. Двух датчиков линии при таком низком их расположении недостаточно. Ширина зоны отслеживания линии получается очень маленькой. При незначительном отклонении модели в сторону линия теряется. Также свой вклад внесла неудовлетворительная работа связки мотор-регулятор на низкой скорости (см. ниже).
(Внимание! Для создания ТС для соревнований RoboTraffic IrDA2 Board использовать нельзя, т.к. он не может работать на скорости 115,2 Кбод.)
Мотор позволяет р/у модели развивать высокую скорость, однако на соревнованиях RoboTraffic это не нужно. Главными требования соревнований в части передвижения по модели городского транспортного движения, являются аккуратность "вождения" и соблюдение ПДД. Заставить указанную связку мотор-регулятор хорошо работать на низкой скорости очень трудно, даже невозможно (см. ТУ проверки выше). Модель ТС начинает двигаться при длительности управляющего сигнала 1573-1576 мкс, а при увеличении длительности больше, чем 1582-1585 мкс (скорость выше), перестаёт удерживаться на линии. Модель удалось заставить двигаться по линии, но как модель двигается в этом промежутке значений длительности можно посмотреть на видео (включите звук). На втором видео, в конце, модель слетает с линии. И надо успеть поймать – до стенки. :)
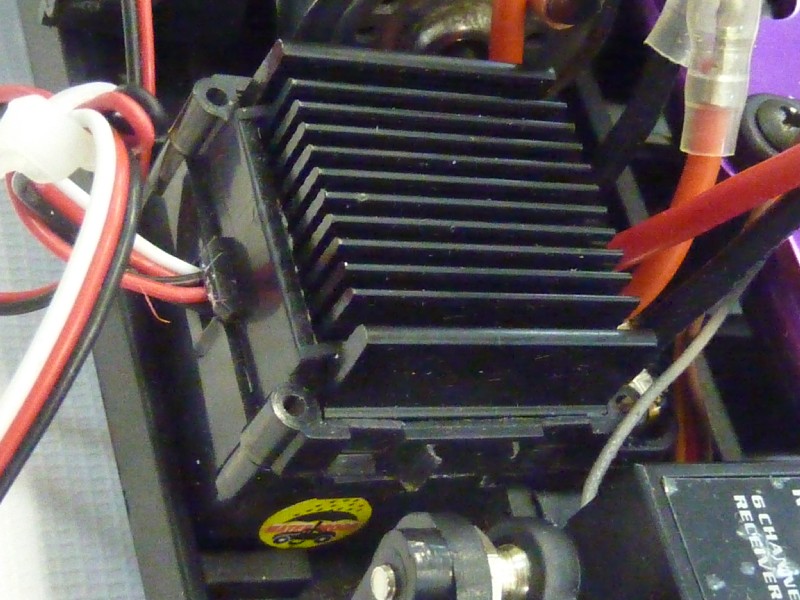
Датчики линии установлены выше, на большем расстоянии от "асфальта" (фото в разделе "мотор 540/55Т").
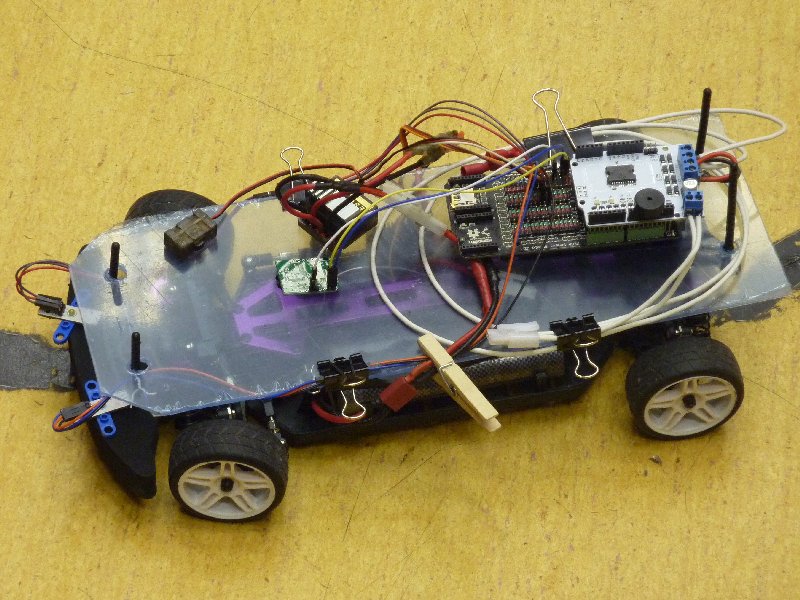
Мотор – 540/55Т (≈ в 2-а раза медленнее штатного). Регулятор скорости (ESC) – NoName (был установлен взамен "подгоревшего" штатного, фото см. выше). Аналоговые датчики линии от Амперки (настройка чувствительности регулятором датчика не проводилась, использовались программные средства). ИК-приёмо-передатчик – IrDA2 Board от MikroElektronika. Библиотека управления сервоприводами – Servo. Питание Arduino от BEC ESC.
(Внимание! Для создания ТС для соревнований RoboTraffic IrDA2 Board использовать нельзя, т.к. он не может работать на скорости 115,2 Кбод.)
На представленом ниже видео видно, что модель ТС при длительности управляющего сигнала 1645 мкс уверенно двигается по линии. Обнаружив Жёлтый сигнал светофора ТС снижает скорость – 1620 мкс (неудачный ракурс съёмки, плохо видно, но если знать, то это заметно). При дальнейшем увеличении скорости ( >1650 мкс) модель начинает периодически терять линию.
На представленном видео модель двигается со следующими настройками длительности управляющего сигнала: движение – 1650 мкс, притормаживание – 1625 мкс. При дальнейшем увеличении скорости модель начинает терять линию. Возможно, однако, что модель могла бы двигаться с большей скоростью. Но, поскольку, как видно на видео, "дорожные службы" ещё не восстановили после зимнего периода "дорожную разметку", этот вопрос не исследовался – опасно быстро ездить.
Сперва, по каким-то невыясненным причинам, модель, даже на "черепашьей" скорости, отказывалась ездить по линии ... надоело, наверное. Тяжёлая и продолжительная борьба с ф/датчиками – раздвинуть-сдвинуть пошире-поуже, наклонить повыше-пониже – хотя и дала некоторый смутный эффект, но к заметным положителтным результатам не привела. Срочно вызванная аварийно-ремонтная дорожная бригада поправила чёрным фломастером дорожную разметку в категорически ненравящихся модели ТС местах. Незначительное улучшение. Пришлось настраивать чувствительность датчиков линии программно. Замена разрядившегося аккумулятора. Результат на видео.
Параметры ШИМ: движение – 145, притормаживание – 115.
Результаты тестирования других возможных сочетаний комплектующих и ПО будут добавлены в ближайшее время:
мотор – регулятор ESC, мотор – MotorShield на L298, стандартный ШИМ, питание Arduino.