|
|
Организаторы

Партнеры
![]()

![]()








Творческая категория
Номер команды: ТС-12
Реставратор Theodor van New
6 место
Всемирное наследие (средняя группа)
- участник всероссийского этапаКоманда: Дружба
Регион: Москва
Город: ЦАО Москвы
Название ОУ: СОШ № 354 им. Д.М.Карбышева
Руководитель команды: Богачева Татьяна Петровна, Богачев Алексей Юрьевич
Оператор №1: Капитонов Даниил
Оператор №2: Комкова Оля
|
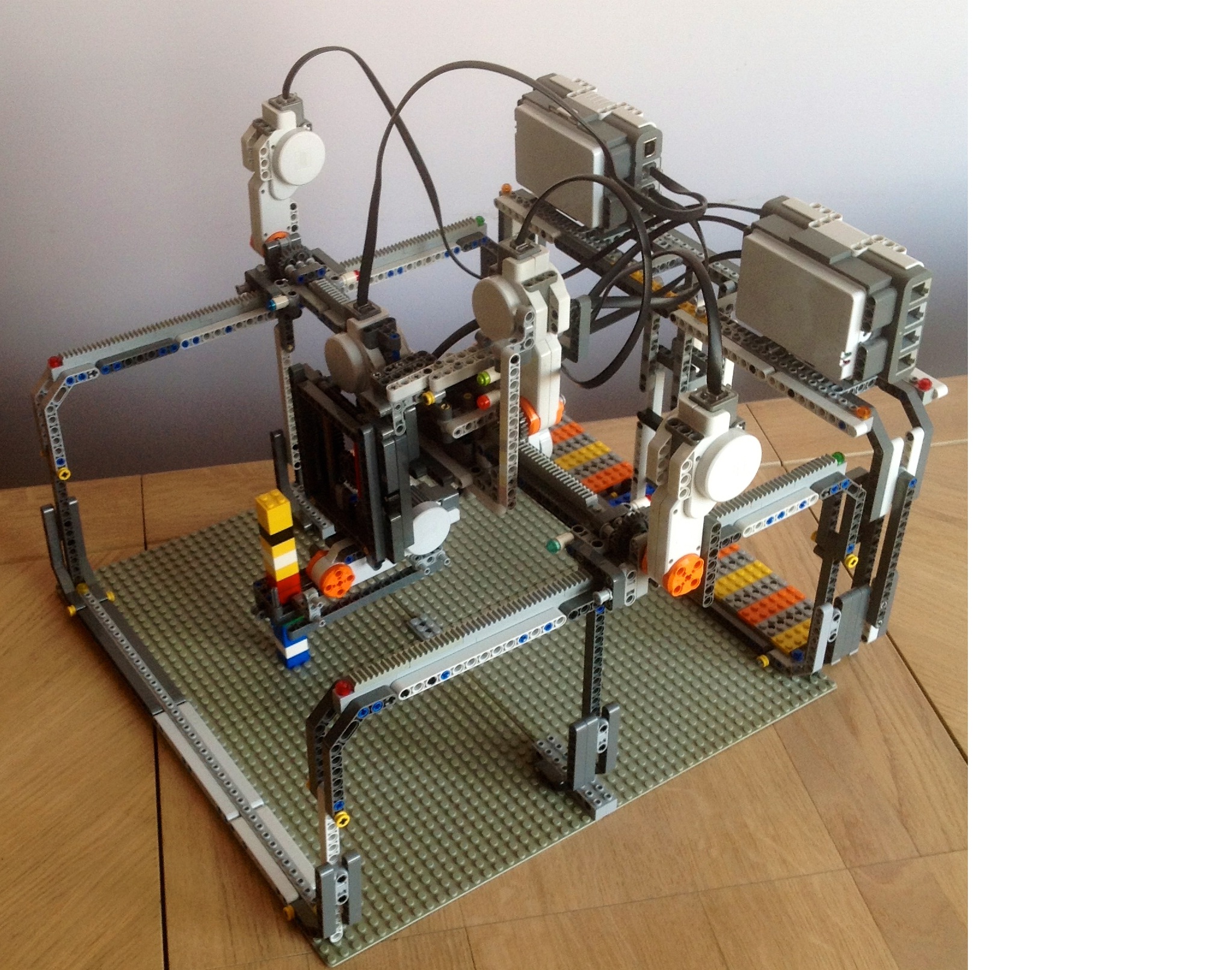
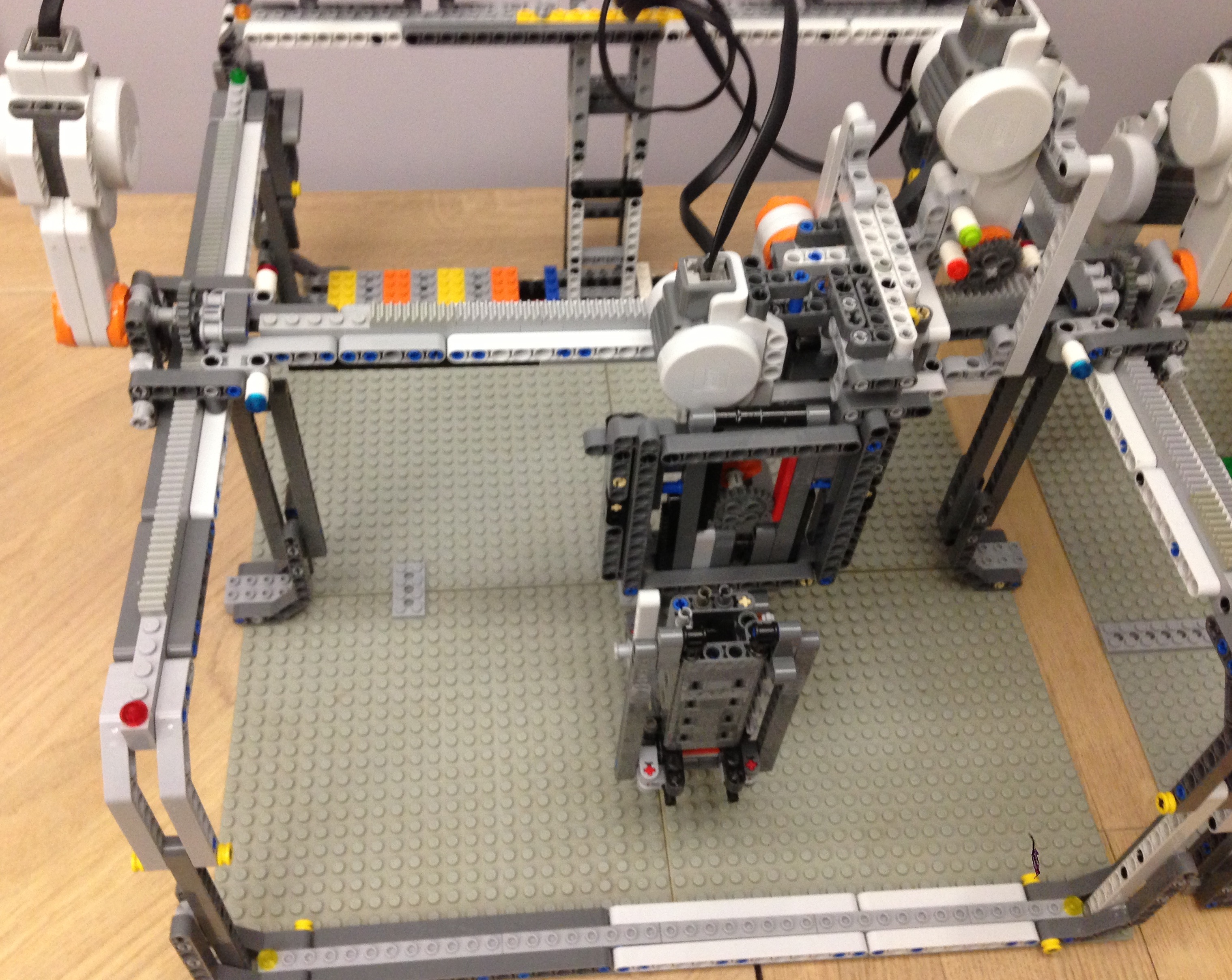
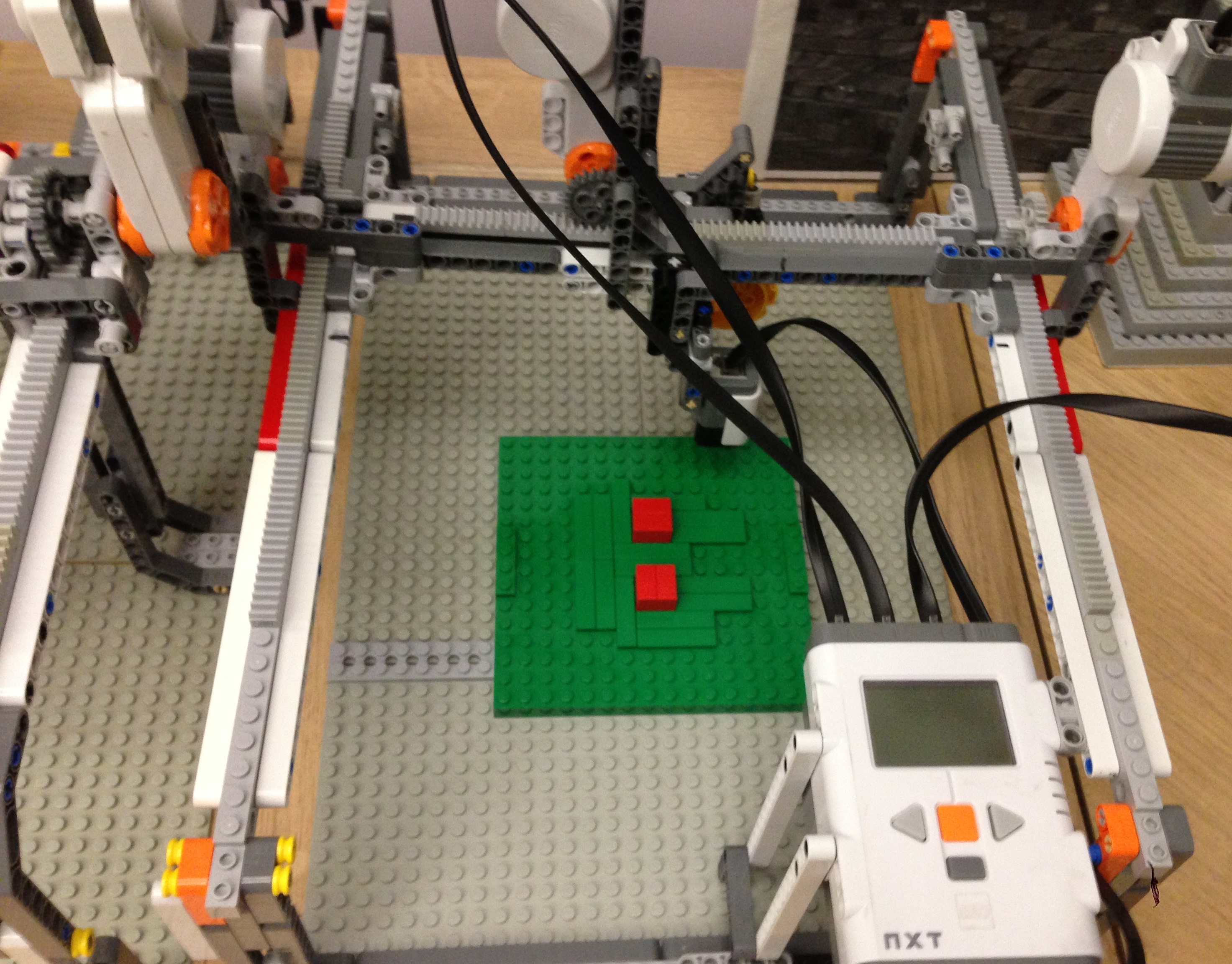
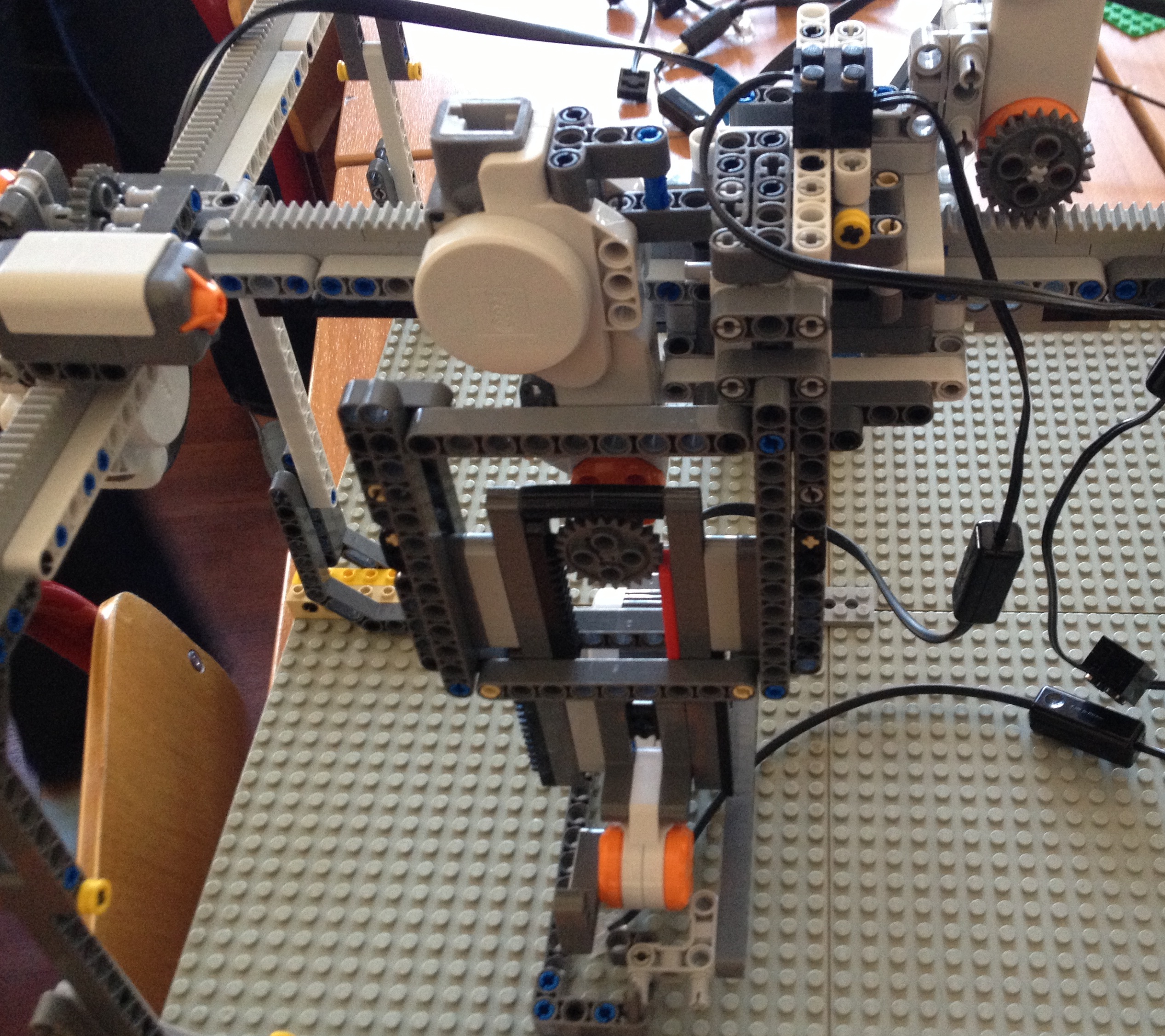
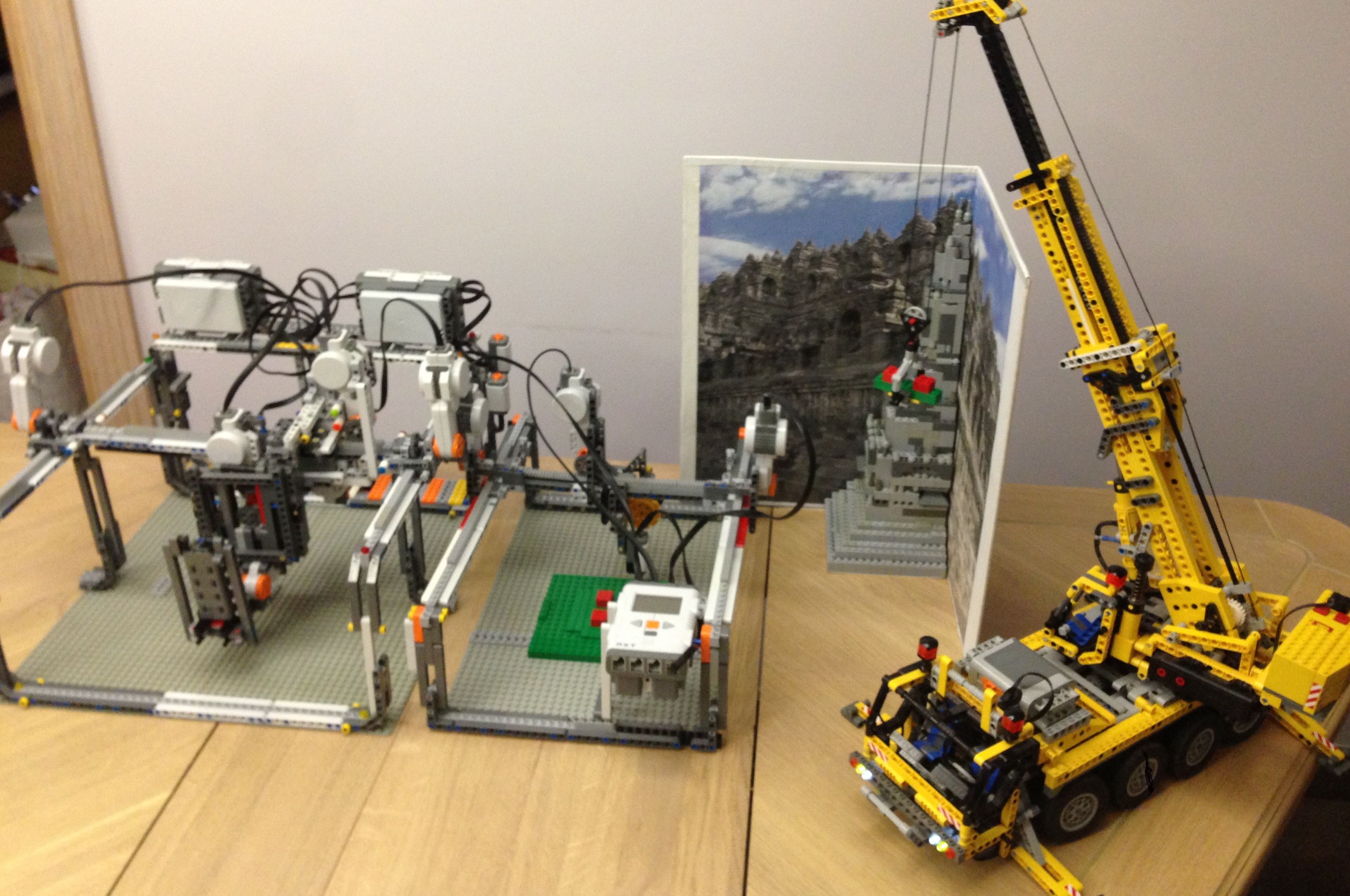
Описание:Необходимо построить робота моделирующего процесс помощи при реставрации храма.Задача робота - облегчить труд человека в операциях, требующих больших физических усилий и монотонных действий, работа в труднодоступных местах. Pобот путем сканирования запоминает форму, цвет и размеры исходного объекта, а затем из аналогичных деталей восстановить изучаемый объект. Также робот должен по исходному плоскому изображению восстановить объект в 3D, по заданной цветовой гамме слоев. Принцип действия:Робот выполняет следующие задачи:1. Исследуемый объект сканируется. Данные о его размере, форме и цветовой гамме сохраняются в массиве. 2. Оператор может скорректировать данные в массиве (добавить недостающие фрагменты). 3. Принтер выстраивает объект из соответствующих (отреставрированных) деталей. В соответствии с заданным масштабом. Робот работает в автономном режиме. Технические характеристики:Робот состоит из двух частей: сканера и 3D-принтера. Связь между ними осуществляется с помощью протокола Bluetooth.В состав робота входят: три микропроцессора NXT, что обусловлено как большим количеством подвижных элементов, так и тем, что к одному микропроцессору можно подключить только три электродвигателя; восемь сервоприводов со встроенными датчикам и, два датчика касания, датчик цвета HT. Используется зубчатая передача. Для управления принтером задействованы два NXT, связь между ними осуществляется с помощью протокола Bluetooth. Головка принтера поднимается на уровень выкладываемого слоя, опускает кубик из «магазина». Программа управления роботом написана в среде RobotC |