|
|
Номер команды: ТАР-010
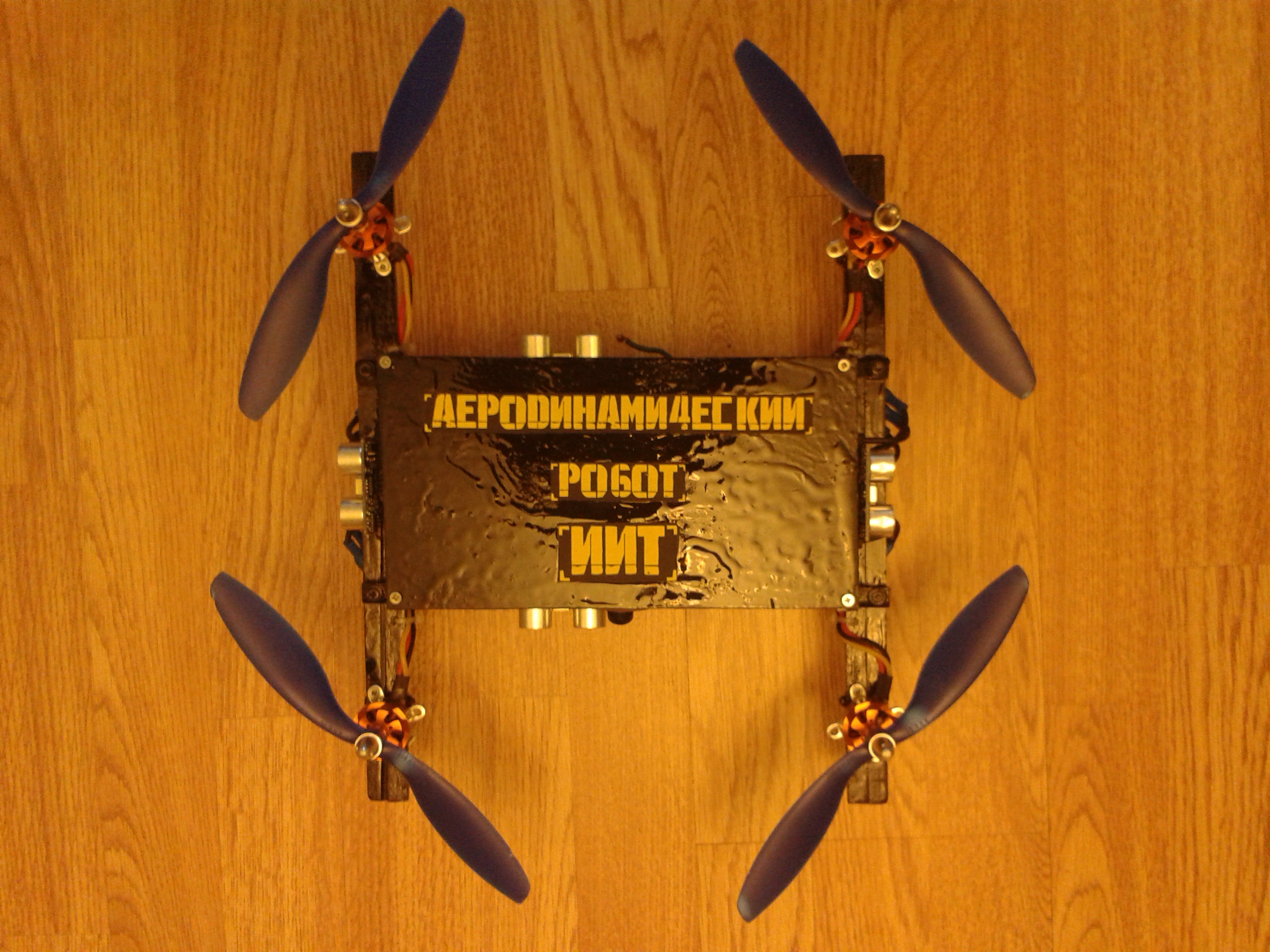
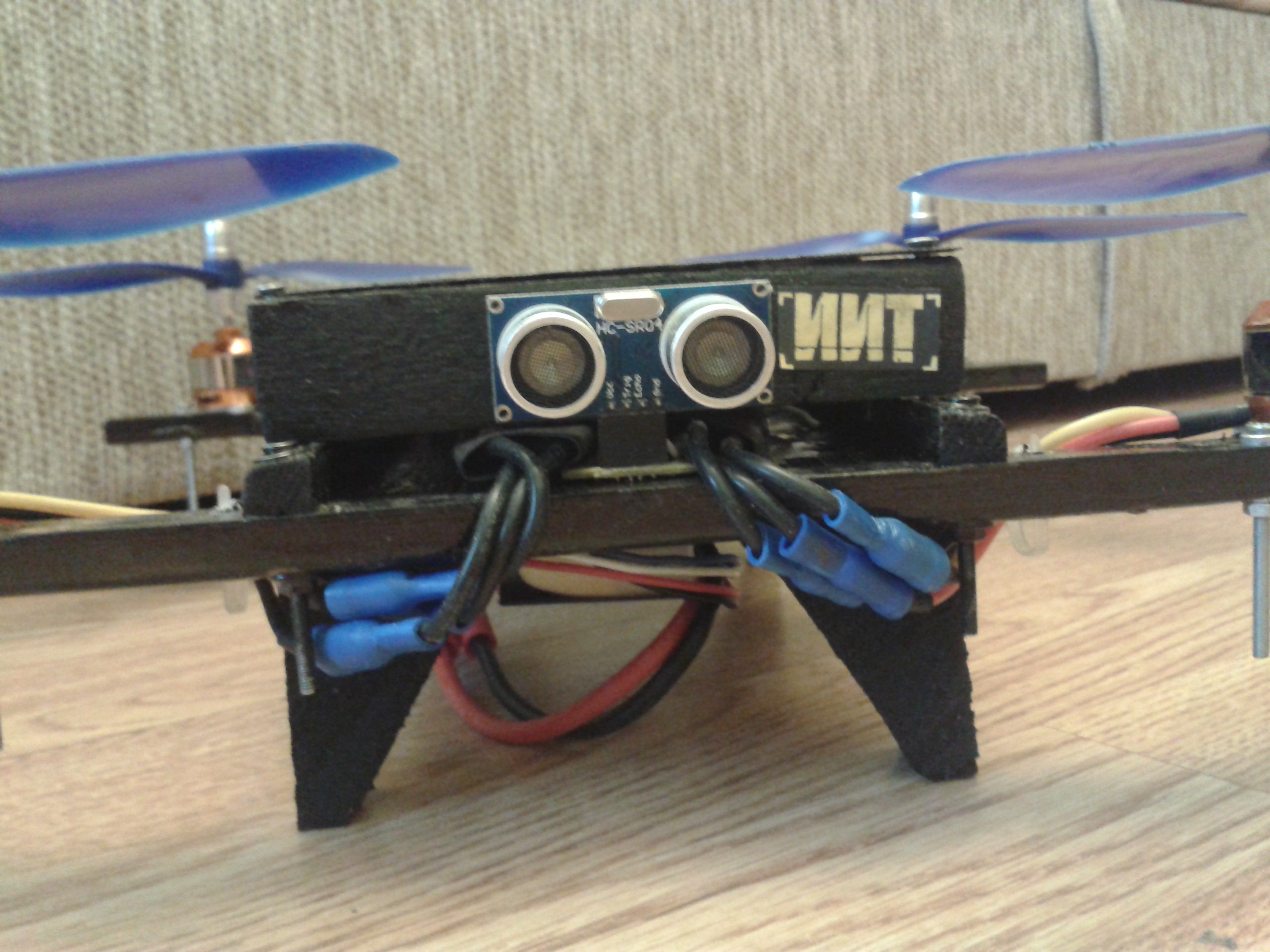
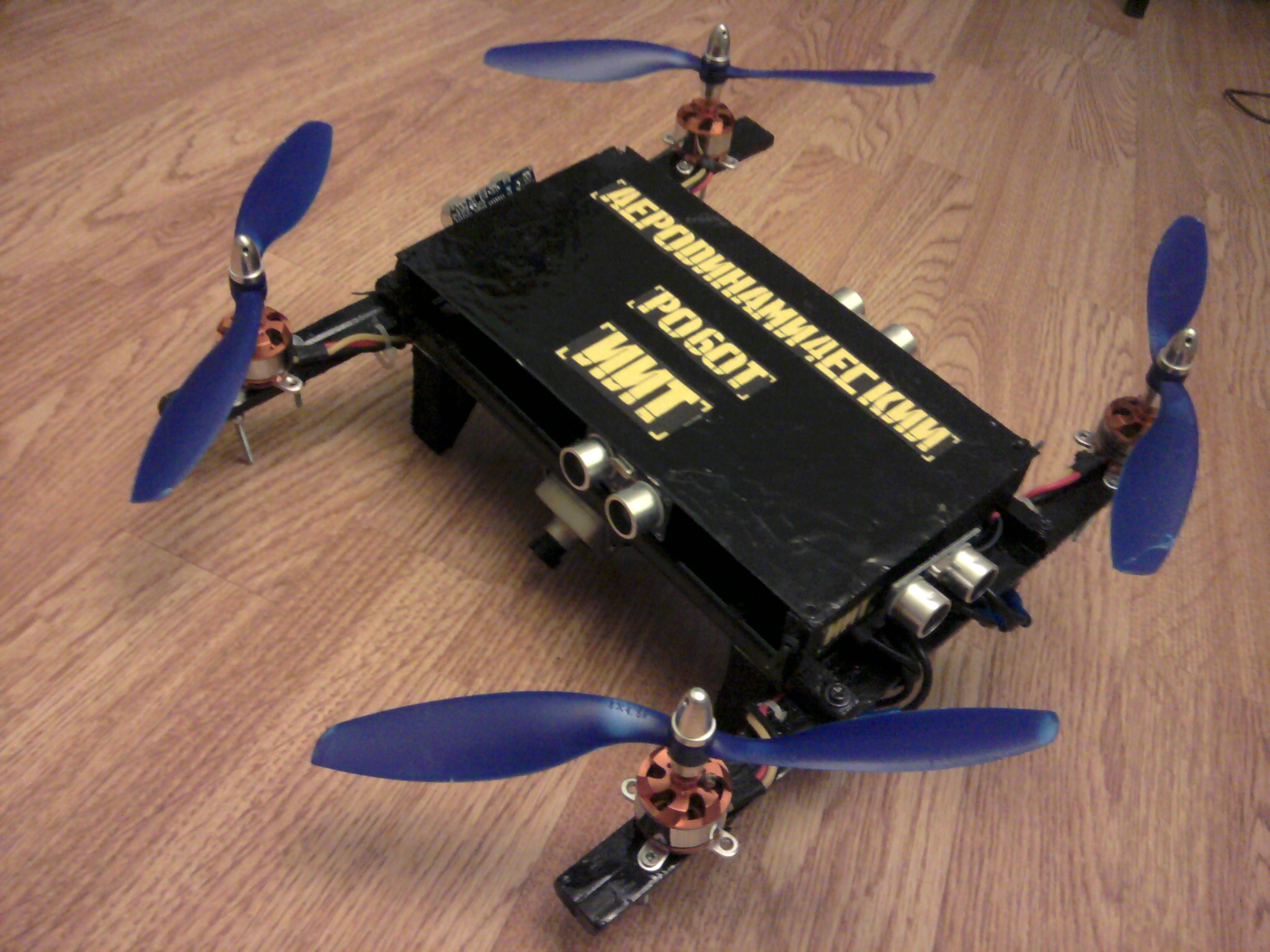
Аэродинамический робот-наблюдатель
Творческая категория. Тема "Робот и живая природа" (Arduino).
- участник всероссийского этапаКоманда: Ижевский индустриальный техникум
Регион: Удмуртская Республика
Город: Ижевск
Название ОУ: Бюджетное образовательное учреждение среднего профессионального образования Удмуртской республики "Ижевский индустриальный техникум"
Руководитель команды: Манченко Илья Вадимович
Оператор №1: Черыгов Иван Владимирович
Оператор №2:
Зарегистрировал робота: Вернигор Александр Николаевич
|
Описание:В наше время большую роль играют системы слежения , которые обеспечивают безопасность населения, животных, растений, разведку местности (мониторинг лесных пожаров, полей) и широко используются в сфере военной обороны. На данный момент существуют множество различных средств слежения и контроля территории , но не все они достаточно универсальны и лишаются возможности применения для слежения в различных условиях . Одной системе сложно , а иногда и вовсе невозможно сочетать в себе многофункциональность и широкий спектр зон контроля и слежения. Область применения аэродинамического робота достаточна широка. Он может отслеживать территорию открытой местности (леса, посевные поля) , а также закрытые помещения (парник с растениями). К примеру , он может производить мониторинг пожароопасных зон. И при обнаружении чрезвычайной ситуации оповещать об этом спецслужбы.Нашей целью является создание системы, которая может способствовать эффективной работе связанной с мониторингом и исследованием местности в различных сферах деятельности человека. Наша задача заключается в создании многоцелевой следящей системы , с использованием новых технических решений и эргономичным сочетанием функций. Новизна нашей проектной модели заключается в автоматическом контроле и преследовании необходимого (обнаруженного) объекта; а также во взаимодействии двух автономных беспилотных роботов, путём обмена информацией по радиосигналу. Принцип действия:Основным является автоматический режим. Это происходит благодаря выполнению команд контроллера, который был запрограммирован по заданному алгоритму полета и блока датчиков . Блок адаптивного управления организован на микроконтроллере ATMEGA168. Для того чтобы двигатель работал по нужному нам алгоритму, мы должны прописать управляющую программу (алгоритм) и записать её в микроконтроллер. Микроконтроллер, согласно управляющей программе, будет подавать управляющие сигналы на полетный контроллер, вследствие чего двигатели будут выполнять заданное действие. Таким образом, происходит осуществление задачи в автоматическом режиме. Беспилотный адаптивный робот оснащён различными датчиками. Датчики вырабатывают сигналы, которые будут приниматься непосредственно микроконтроллером блока адаптивного управления. Микроконтроллер в свою очередь реагирует на эти сигналы, в зависимости от управляющей программы вырабатываются управляющие сигналы.Технические характеристики:Диаметр винта – 20.5 смДлина – 32 см Ширина – 26 см Полетный вес – 1,5 кг Электрический мотор - бесколлекторный тип D2822 Аккумулятор - Li-PO ; Емкость-2650mAh ; Напряжение- 11.1 V Передатчик - FM 6 каналов Приемник - FM 6 каналов Ультразвуковой модуль - HC-SR04 Плата стабилизации - КК HobbyKing Quadcopter Плата Arduino |