|
|
Номер команды: ТСР-005
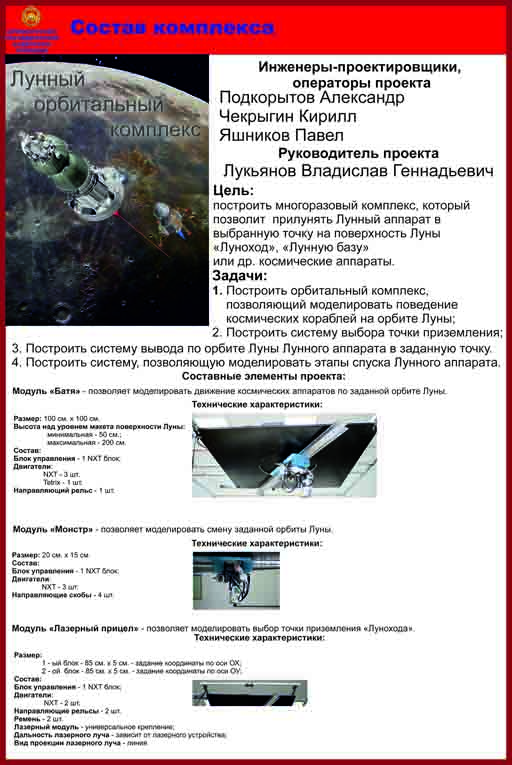
Лунный орбитальный комплекс
Творческая категория. Тема "Роботы и космос". Средняя группа.
- участник всероссийского этапаКоманда: ОренКадет
Регион: Оренбургская Область
Город: Оренбург
Название ОУ: Федеральное государственное казенное общеобразовательное учреждение Оренбургское Президентское кадетское училище
Руководитель команды: Лукьянов Владислав Геннадьевич
Дополнительный руководитель: Трофимов Павел Александрович
Оператор №1: Яшников Павел
Оператор №2: Чекрыгин Кирилл
Дополнительные операторы: Подкорытов Александр
Зарегистрировал робота: Лукьянов Владислав

|
Описание:Наш проект является актуальным т.к. Россия сейчас усиленно работает над освоением луны. Не смотря на то, что земные космические корабли не раз посещали луну, и задача высадки уже решена, но проблемы высадки на указанную точку еще присутствуют. Наш проект как раз решает эту проблему.Для начала мы просмотрели множество фотографий о высадке на луну. У нас было множество вариантов по созданию нашего проекта, но мы решили сделать именно этот. Затем мы придумали конструкцию нашего автоматизираного робота, после чего нарисовали её в специальной программе “компас”, и немного позже приступили к реализации нашего проекта. Также в нашем проекте были и недочеты. Каждый раз мы сталкивались с проблемой перепрограммирования и переконструирования. Так как поверхность луны не ровная и робот должен проехать довольно большое расстояние и оставаться рабочем и на ходу мы не стали делать его на гусеницах как и настоящие луноходы. Нашей орбитой управляет конструктор TETRIX.На заданную орбиту луны вывелись два робота предназначенных для посадки и обустройства поверхности луны и последующего его изучения. Этот проект предназначен для того чтобы показать людям систему посадки на луну изучения её поверхности. Вы наверно уже заметили пульт, который лежит на столе. Он предназначен для указания точки прилунения. Програмно мы сделали, так что робот, который управляет лазером, сканирует поверхность и передает по Bluetooth координаты, куда светит лазер а, роботы по орбите выходят на заданную точку и начинают прилунение на точку указанную лазером. Пожалуйста возьмите в руки пульт и укажите точку куда хотите что бы робот прилунился.(Робот прилунился) Первый робот сейчас идет на середину нашего макета луны и начинает расставлять светодиоды для того чтобы люди могли сориентироваться на поверхности луны. Второй робот спустит людей на поверхность Луны… Принцип действия:Наводит цель в виде лазерного луча, опускает в точку прицеливания лунный модульТехнические характеристики:Lego NXT, Tetrix |