|
|
Номер команды: ТСР-001
STORM
Творческая категория. Тема "Роботы и космос". Средняя группа.
- участник всероссийского этапаКоманда: Mechatronic
Регион: Москва
Город: ЗАО Москвы
Название ОУ: ГБОУ СОШ № 1436
Руководитель команды: Максимова Галина Юрьевна
Оператор №1: Пашков Иван
Оператор №2: Серопян Сергей
Дополнительные операторы: Голунов Илья
Зарегистрировал робота: Максимова Галина Юрьевна
|
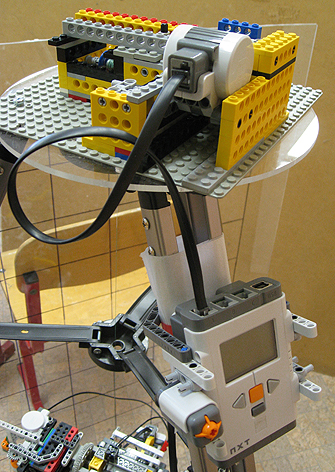
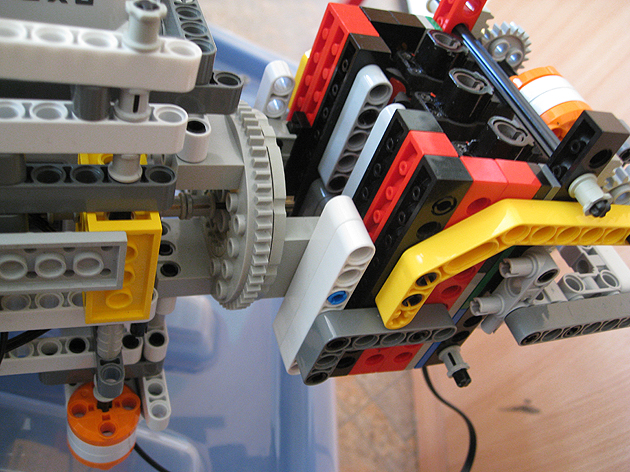
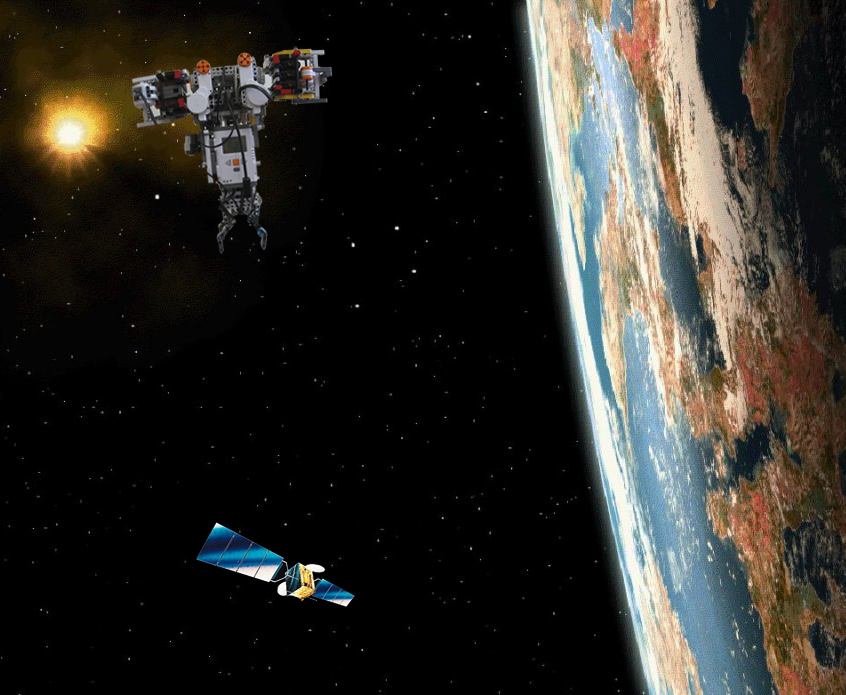
Описание:Цель проекта:создать модель робота для удаления из околоземного космического пространства вышедших из строя спутников и космических аппаратов, других тел, совершающих неконтролируемое движение, создающих помеху для движения работающих спутников, орбитальных станций, космических кораблей. Принцип действия:Движение робота по орбите имитируется движением по вертикали. Маневрирует робот за счёт оригинальных реактивных двигателей с изменяемым вектором тяги, что должно позволить компенсировать возможное неконтролируемое вращение самого робота. На борту имеется система для захвата космических тел. Прицеливание на объект производится с помощью двух датчиков расстояния. Хват оборудован чувствительной контактной системой. |