|
|
Номер команды: ТСТ-003
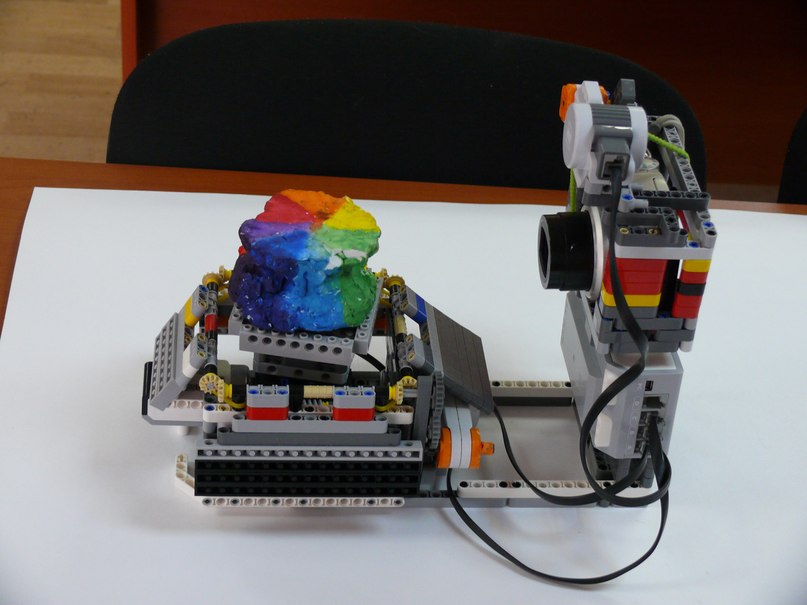
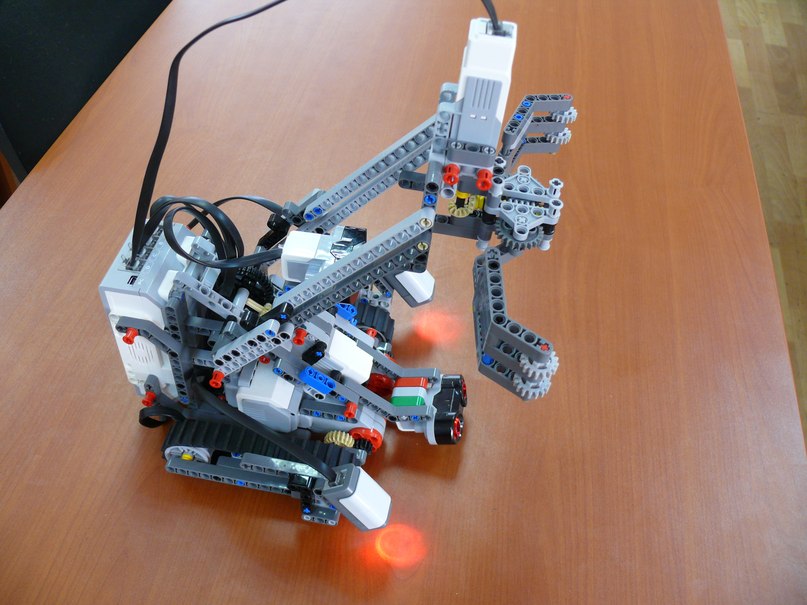
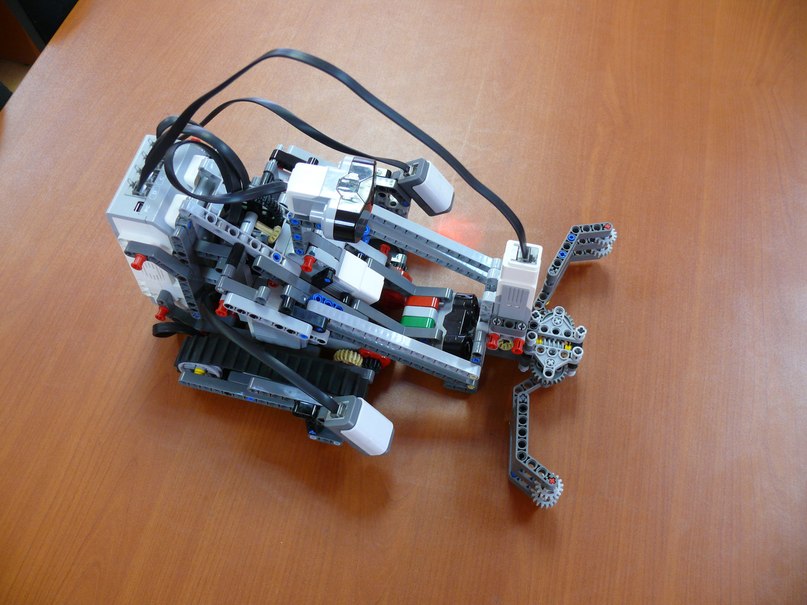
Комплекс для сбора образцов грунта с поверхности небесных тел и создания их 3D-фотографий
Творческая категория. Тема "Роботы и космос". Старшая группа.
- участник всероссийского этапаКоманда: Автоботы
Регион: Мурманская Область
Город: Мурманск
Название ОУ: ГАОУМОДОД "МОЦДОД "Лапландия"
Руководитель команды: Федулеев Александр Александрович
Оператор №1: Федулеева Екатерина
Оператор №2: Федулеева Татьяна
Зарегистрировал робота: Федулеев Александр Александрович

|
Описание:При исследовании поверхности небесных тел возникает необходимость отправлять на Землю фотографии образцов грунта для изучения их специалистами. Чтобы лучше изучить объект, необходимо рассмотреть его со всех сторон.Скорость передачи данных с космическими аппаратами, находящимися от Земли на больших расстояниях, очень мала. Например, самый последний из запущенных аппаратов «Новые горизонты» имеет скорость передачи данных 38 кбит/с в районе Юпитера и всего лишь 768 бит/с в районе Плутона. 3D-фотография позволяет рассмотреть объект со всех сторон, при этом она имеет небольшой объем по сравнению с файлами видеосъемки. Созданный нами программно-аппаратный комплекс позволяет собирать образцы грунта и создавать их 3D-фотографии. Комплекс состоит из робота-манипулятора для сбора образцов, поворотного стола и фотоаппарата. Собранные снимки обрабатываются специально созданной компьютерной программой для получения качественной 3D-фотографии объекта. Принцип действия:Робот-манипулятор использует датчики для поиска объектов. Когда объект найден, производится его захват и транспортировка на поворотный стол. Для навигации используется инфракрасный сенсор. Предусмотрено ручное управление роботом при помощи геймпада при возникновении нештатных ситуаций. Поворотный стол оснащен специальным механизмом для выравнивания образцов.После доставки образца производится автоматическая съемка объекта со всех сторон. Полученные снимки при помощи технологии EYE-FI отправляются в компьютер, где и обрабатываются. После фотографирования образцы помещаются в специальный контейнер-хранилище. Технические характеристики:2 блока EV3, 7 двигателей, 2 датчика освещенности, 1 инфракрасный датчик,1 маяк EV3, 1 датчик расстояния.Программа для роботов написана на языке EV3-G. Размер поля 120*120 см. Программа для компьютера написана на языке С# в среде Visual Studio 2012. |