
|
|
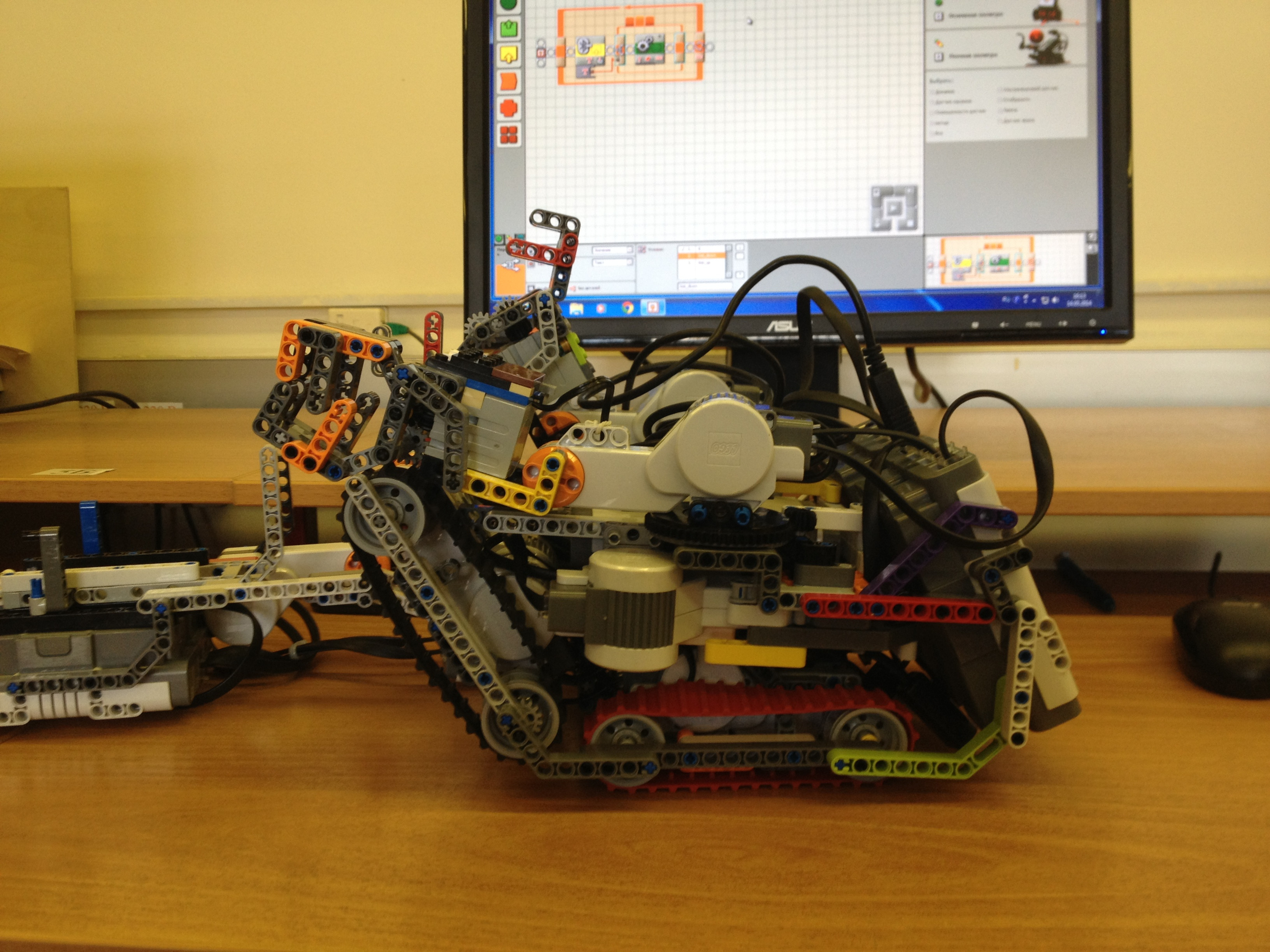
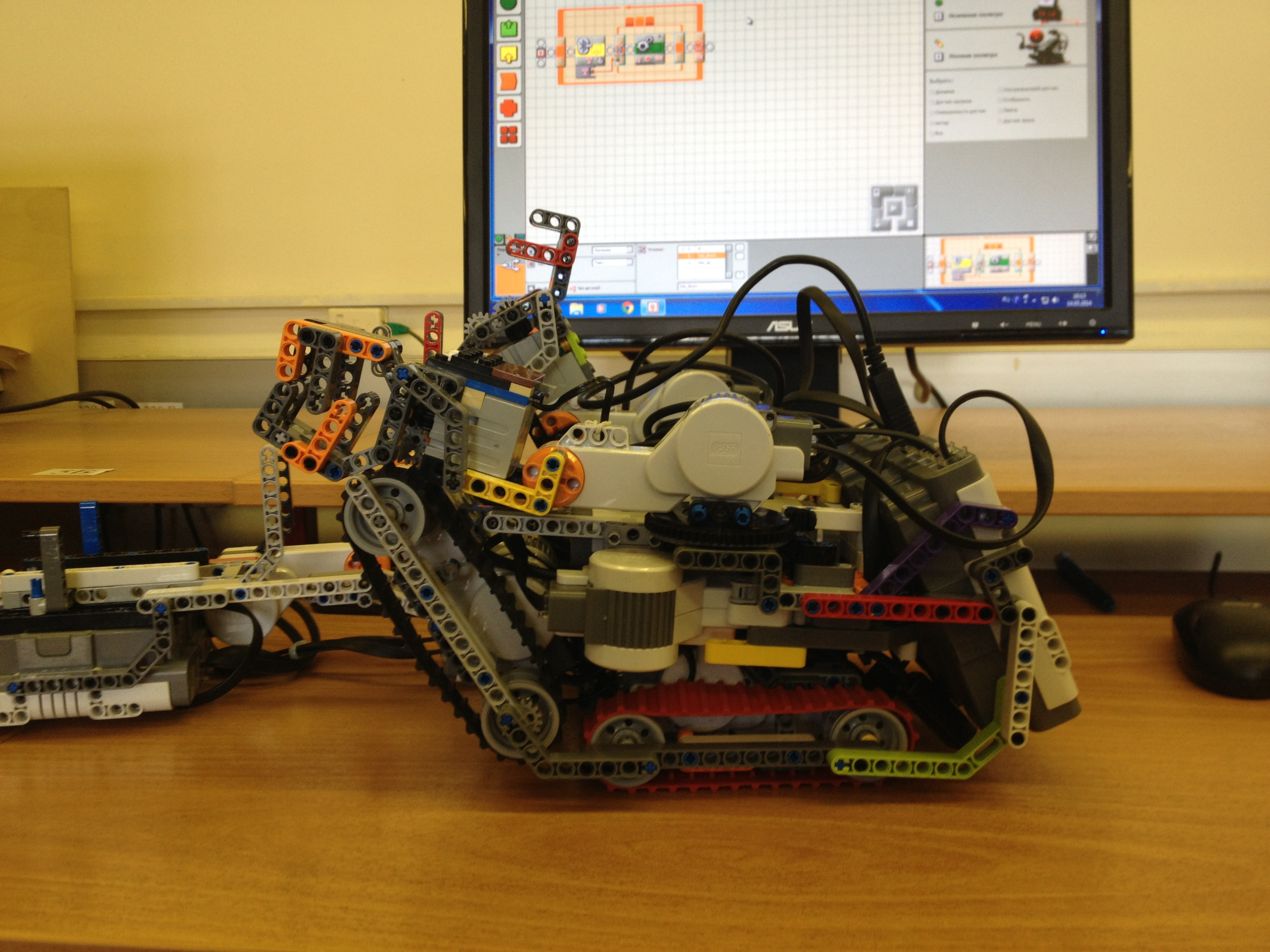
Помощник космонавта
Творческая категория. Тема "Роботы и космос". Младшая группа.
Команда: ДружбаРегион: Москва
Город: ЦАО Москвы
Название ОУ: ГБОУ СОШ № 354 им. Д.М.Карбышева
Руководитель команды: Богачева Татьяна Петровна
Оператор №1: Бондарь Георгий
Оператор №2: Киселев Владислав
Зарегистрировал робота: Богачева Татьяна Петровна

|
Описание:Мобильные роботы находят широкое применение в наши дни и используются для решения различных задач. В настоящее время уделяется большое внимание проблеме использования роботов для изучения планет. Роботы должны помогать людям или вовсе заменять космонавтов при выполнении особо опасных или сложных задач, при выполнении повторяющихся операций, отнимающих много времени работ и даже миссий, которые человек выполнить просто не может в силу неблагоприятных для него условий. Роботы не нуждаются в еде, питье, способны работать круглосуточно и выполняют некоторые задания быстрее и точнее людей. Вдобавок потеря автомата лучше гибели космонавта.Целью данной работы было создание мобильного дистанционно управляемого робота, способного двигаться по пересеченной местности, захватывать манипуляторами различные объекты, проводить замеры с помощью датчиков. Такой робот может передвигаться по поверхности другой планеты, неся на борту научные приборы. Принцип действия:1. Для управления движением робота помощника используется пульт дистанционного управления.2. Для управления манипуляторами используется специальный костюм, который одевает на руки космонавт. Движения манипуляторов повторяют движения рук космонавта. Для движения робота используется гусеничная платформа повышенной проходимости. Она позволяет роботу быстро перемещаться по пересеченной поверхности и преодолевать различные препятствия. Технические характеристики:Робот состоит из трех микропроцессоров NXT (см. Рис.3), что обусловлено как количеством подвижных элементов, так и тем, что к одному микропроцессору можно подключить только три электродвигателя. Для каждого подвижного элемента задействован один мотор, в результате в модели задействовано шесть сервоприводов, 2 электромотора: поворот манипуляторов вправо-влево, движение вверх-вниз, захват-отпускание захвата, поднятие манипуляторов.Такое количество моторов создало несколько сложностей, в том числе: -Необходимость использовать три микропроцессора и их компактное и удобное расположение. -Сложность компоновки моторов и конструирования узлов для полноценного управления всеми частями робота. Для управления одним манипулятором задействовано два сервопривода и электромотор непосредственно на самой руке. В роботе используются червячные и зубчатые передачи. Подвижная платформа робота на гусеничном ходу. Управление движением осуществляется при помощи пульта. Для управления манипуляторами используется специальный костюм, который одевает на руки космонавт. Движения манипуляторов повторяют движения рук космонавта. |

{kind=link}