
|
|
Примеры решений
Робот для траектории на основе LEGO EV3
Статья описывает процесс создания ездящего по линии робота из базового учебного набора EV3.
Робот для траектории на основе Arduino
Доступная инструкция от специалистов ООО "Амерка" по созданию робота на основе простейшей мобильной платформы под управлением Arduino Uno.

Траектория. Алгоритм.
В этом состязании участникам необходимо подготовить автономного робота, способного проехать от зоны старта до зоны финиша по траектории, составленной из типовых элементов, преодолевая препятствия.
1. Условия состязания
1.1. Робот должен набрать максимальное количество очков, двигаясь по черной линии траектории от зоны старта до зоны финиша.
1.2. Во время проведения попытки участники команд не должны касаться роботов.
1.3. Если во время поптыки робот съедет с черной линии, т.е. окажется всеми колесами или другими деталями, соприкасающимися с полем, с одной стороны линии, то попытка остановится (за исключением мест заранее оговоренных оргкомитетом) и робот получит очки, заработанные до этого момента.
1.4. Если во время попытки робот станет двигаться неконтролируемо или не сможет продолжить движение в течение 20 секунд, то получит очки, заработанные до этого момента.
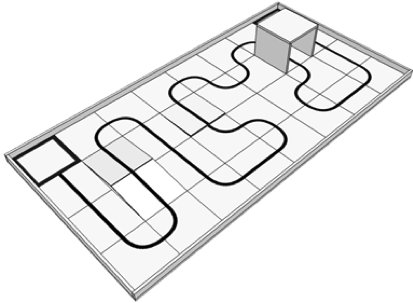
2. Поле
2.1. Поле состоит из секций 300 х 300 мм на которых отмечена траектория по которой должен следовать робот.
2.2. Траектория может отмечаться чёрной линией на белом фоне, либо белой линией на чёрном фоне. Ширина линии 25 мм.
2.3. Траектория может состоять из следующих секций:
|
Простой квадрат |
Гладкий поворот |
Прямая линия |
Перекрёсток |
|
|
|
|
|
|
Ответвление |
Крутой поворот |
Кривая |
Инверсная прямая |
|
|
|
|
|
|
Инверсный
гладкий поворот
|
Инверсный перекресток
|
Пустая секция |
|
|
|
|
|






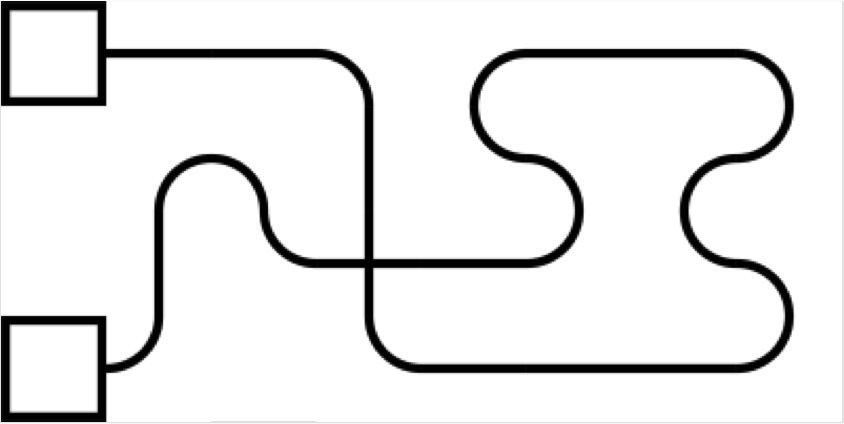
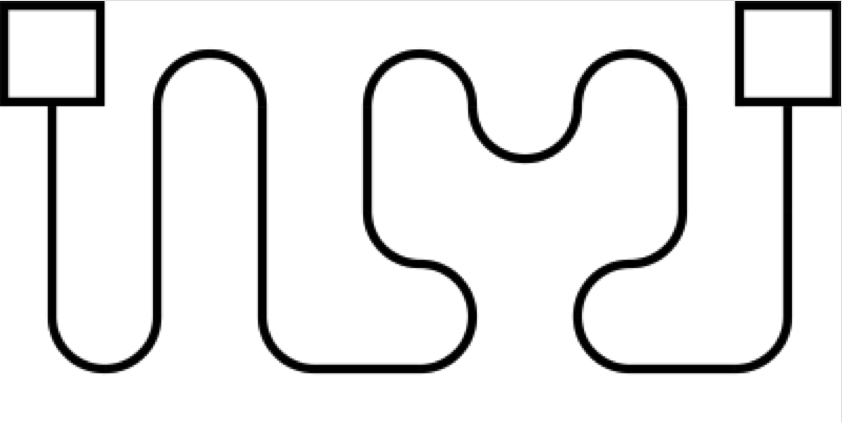
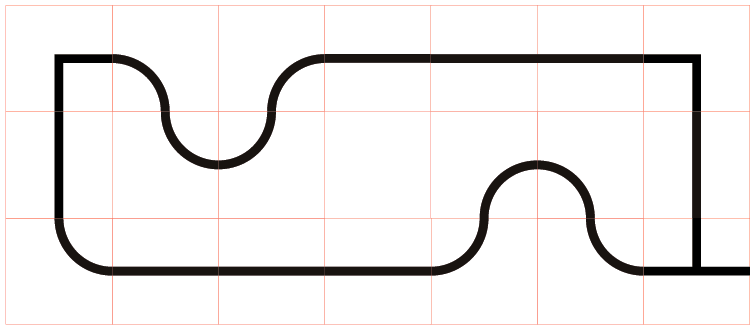
Примеры траекторий:
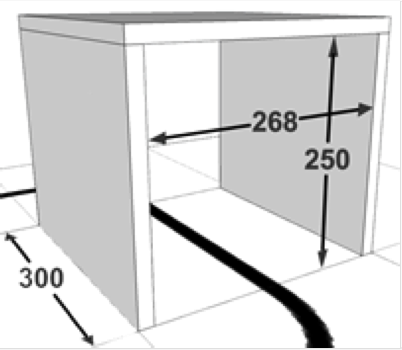
2.4. На траектории возможно использование дополнительных элементов: горок, трамплинов, препятствий, туннелей, банок и т.п.:
Варианты дополнительных элементов:
· Банка. Пустая алюминиевая банка для газированных напитков 0.33 л. Банка стоит на траектории, робот должен объехать банку не коснувшись.

· Тоннель. Размер проёма 268 мм шириной, 250 мм высотой и 300 мм длиной. Толщина стенок 16мм. Цвет поверхностей белый. Тоннель прикреплен к поверхности поля.
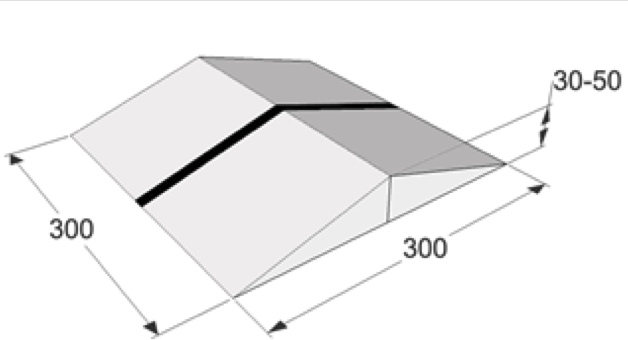
· Трамплин. Размер 300х300 мм. Подъем может быть высотой 30 – 50 мм. Цвет поверхности белый с черной линией по середине. Трамплин прикреплен к поверхности поля.
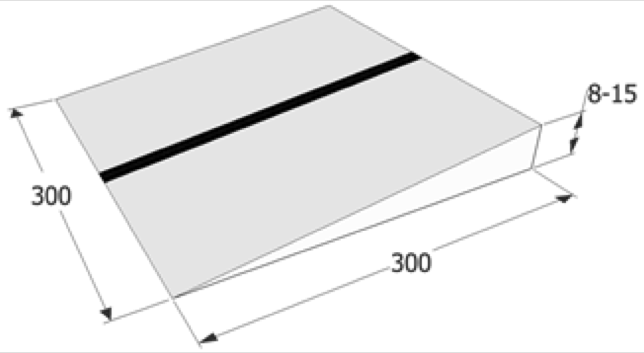
· Маленькая горка. Размер горки: 300 мм шириной, 300 мм длиной и 30~50 мм высотой. Основной цвет поверхности белый. Горка прикреплена к поверхности поля.
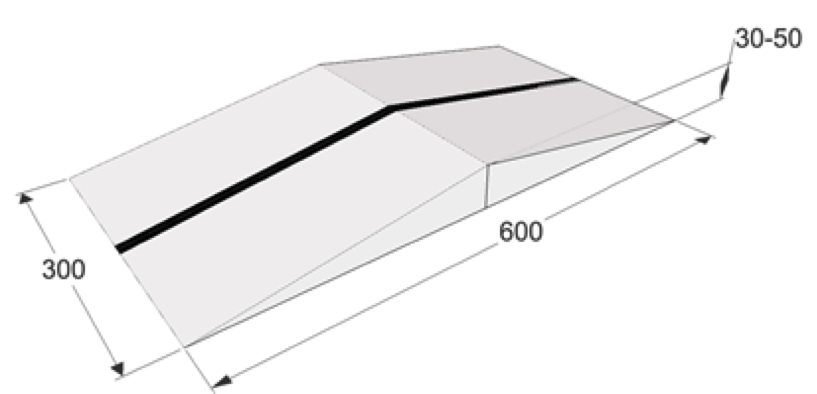
· Большая горка. Размер горки: 300 мм шириной, 600 мм длиной и 30~50 мм высотой. Основной цвет поверхности белый. Горка прикреплена к поверхности поля.
3. Робот
3.1. На роботов не накладывается ограничений на использование каких либо комплектующих, кроме тех, которые могут как-то повредить поверхность поля.*
3.2. Максимальные размеры робота 250х250х250 мм.
3.3. Во время попытки робот может менять свои размеры, но исключительно без вмешательства человека.
3.4. Робот должен быть автономным.
3.5. Робот, по мнению судей, как либо повреждающий покрытие поля, будет дисквалифицирован на всё время состязаний.
3.6. Перед началом раунда роботы проверяются на габариты.
4. Проведение Соревнований.
4.1. Соревнования состоят не менее чем из двух раундов (точное число определяется оргкомитетом).
4.2. Каждый раунд состоит из серии попыток всех роботов, допущенных к соревнованиям.
4.3. Перед первым раундом и между раундами команды могут настраивать своего робота.
4.4. До начала раунда команды должны поместить своих роботов в область «карантина»*. После подтверждения судьи, что роботы соответствуют всем требованиям, соревнования могут быть начаты.
4.5. Если при осмотре будет найдено нарушение в конструкции робота, то судья дает 3 минуты на устранение нарушения. Однако, если нарушение не будет устранено в течение этого времени, команда не сможет участвовать в состязании.
4.6. После помещения робота в «карантин» нельзя модифицировать или менять роботов (например: загрузить программу, поменять батарейки) до конца раунда.*
4.7. В начале попытки робот выставляется в зоне старта так, чтобы все касающиеся поля части робота находились внутри стартовой зоны.
4.8. По команде судьи отдаётся сигнал на старт, при этом оператор должен запустить робота.
4.9. Конфигурация поля будет одна и та же для всех роботов, участвующих в текущем раунде.
4.10. В каждом раунде конфигурация поля может меняться.*
4.11. Оператор может попросить судью о досрочной остановке времени, громко сказав: «СТОП» и подняв руку. В этом случае будут засчитаны те очки, который робот заработал до этого момента.
4.12. Максимальная продолжительность попытки составляет 2 минуты*, по истечении этого времени попытка останавливается и робот получит то количество очков, которое заработает за это время.
5. Судейство
5.1. Оргкомитет оставляет за собой право вносить в правила состязаний любые изменения, если эти изменения не дают преимуществ одной из команд.
5.2. Контроль и подведение итогов осуществляется судейской коллегией в соответствии с приведенными правилами.
5.3. Судьи обладают всеми полномочиями на протяжении всех состязаний; все участники должны подчиняться их решениям.
5.4. Судья может использовать дополнительные попытки для разъяснения спорных ситуаций.
5.5. Если появляются какие-то возражения относительно судейства, команда имеет право в устном порядке обжаловать решение судей в Оргкомитете не позднее окончания текущего раунда.
5.6. Переигровка может быть проведена по решению судей в случае, если робот не смог закончить этап из-за постороннего вмешательства, либо когда неисправность возникла попричине плохого состояния игрового поля, либо из-за ошибки, допущенной судейской коллегией.
5.7. Члены команды и руководитель не должны вмешиваться в действия робота своей команды или робота соперника ни физически, ни на расстоянии. Вмешательство ведет к немедленной дисквалификации.
5.8. Судья может закончить поптыку по собственному усмотрению, если робот не сможет продолжить движение в течение 20 секунд.
5.9. Система ранжирования предусматривает бальную оценку выполнения задания. При этом, баллы в поптыке даются за полное пересечение определённых зон. В таком случае в первую очередь оценивается количество заработанных баллов, а поптыки роботов с одинаковыми лучшими баллами, оцениваются по времени затраченному на выполнение задания.
6. Правила отбора победителя
6.1. За проезд через секцию или преодоление дополнительного элемента робот зарабатывает очки:
o элемент с фрагментом траектории – 10 очков.
o дополнительный элемент – 10 очков.
(оргкомитет может изменить количество очков за секции и элементы, а также методику подсчёта).
6.2. Очки за секцию или элемент начисляются, только если секция или элемент преодолены полностью.
6.3. При ранжировании учитывается результат попытки с самым большим числом очков из всех попыток (не сумма). Если команды имеют одинаковое число очков, то будет приниматься во внимание количество очков всех других попыток. Если и в этом случае у команд будет одинаковое количество очков, то будет учитываться время, потребовавшееся команде для завершения лучшей попытки.
* отмеченные пункты регламента могут быть отменены или изменены оргкомитетом конкретного этапа соревнований.