|
|
Организаторы

Партнеры
![]()

![]()








Творческая категория
Номер команды: ТБ-08
Watcher
Всемирное наследие (старшая группа)
Команда: Дружба
Регион: Москва
Город: ЦАО Москвы
Название ОУ: СОШ № 354 им. Д.М.Карбышева
Руководитель команды: Богачева Татьяна Петровна
Оператор №1: Большаков Максим
Оператор №2: Бугай Кирилл
|
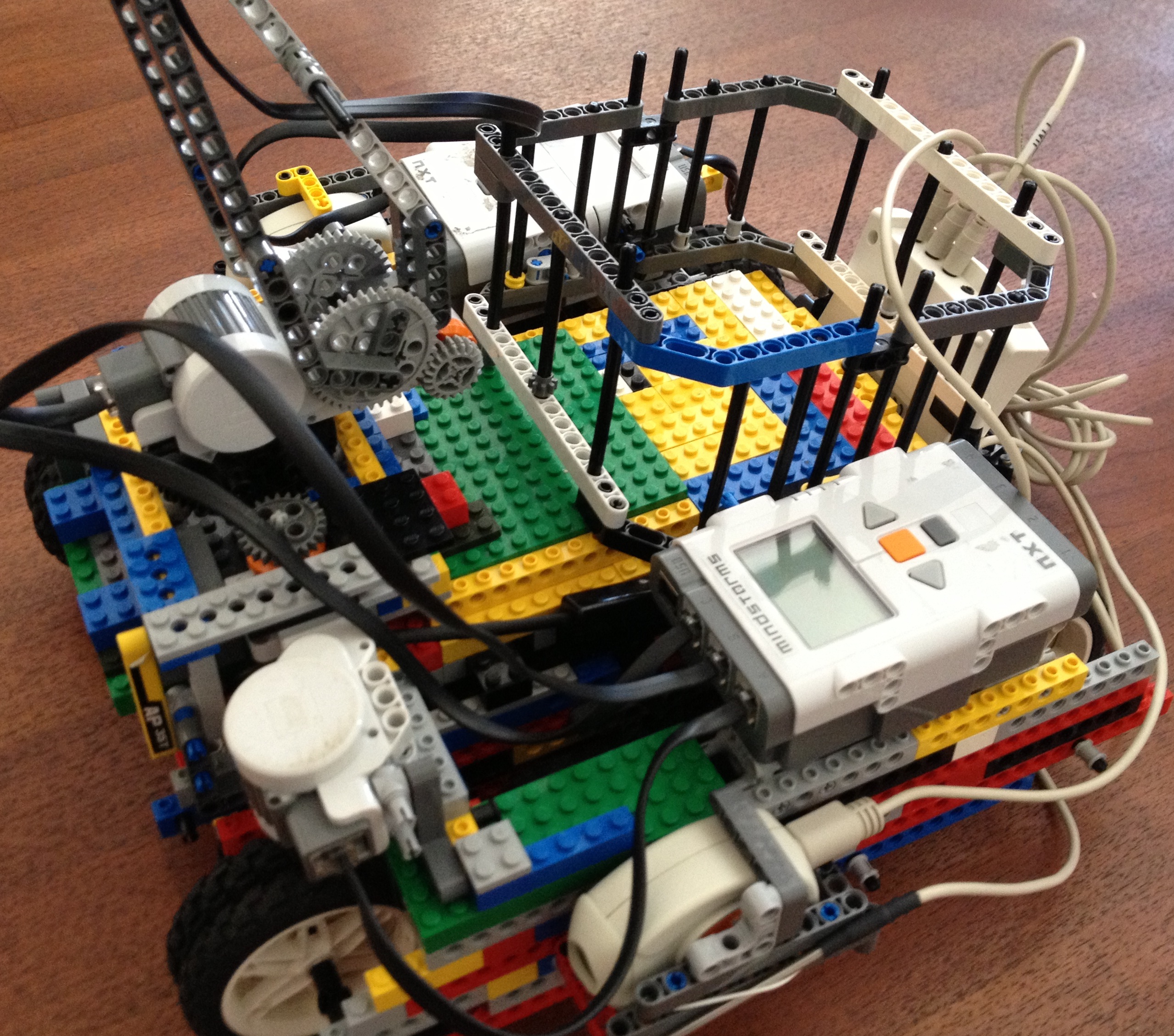
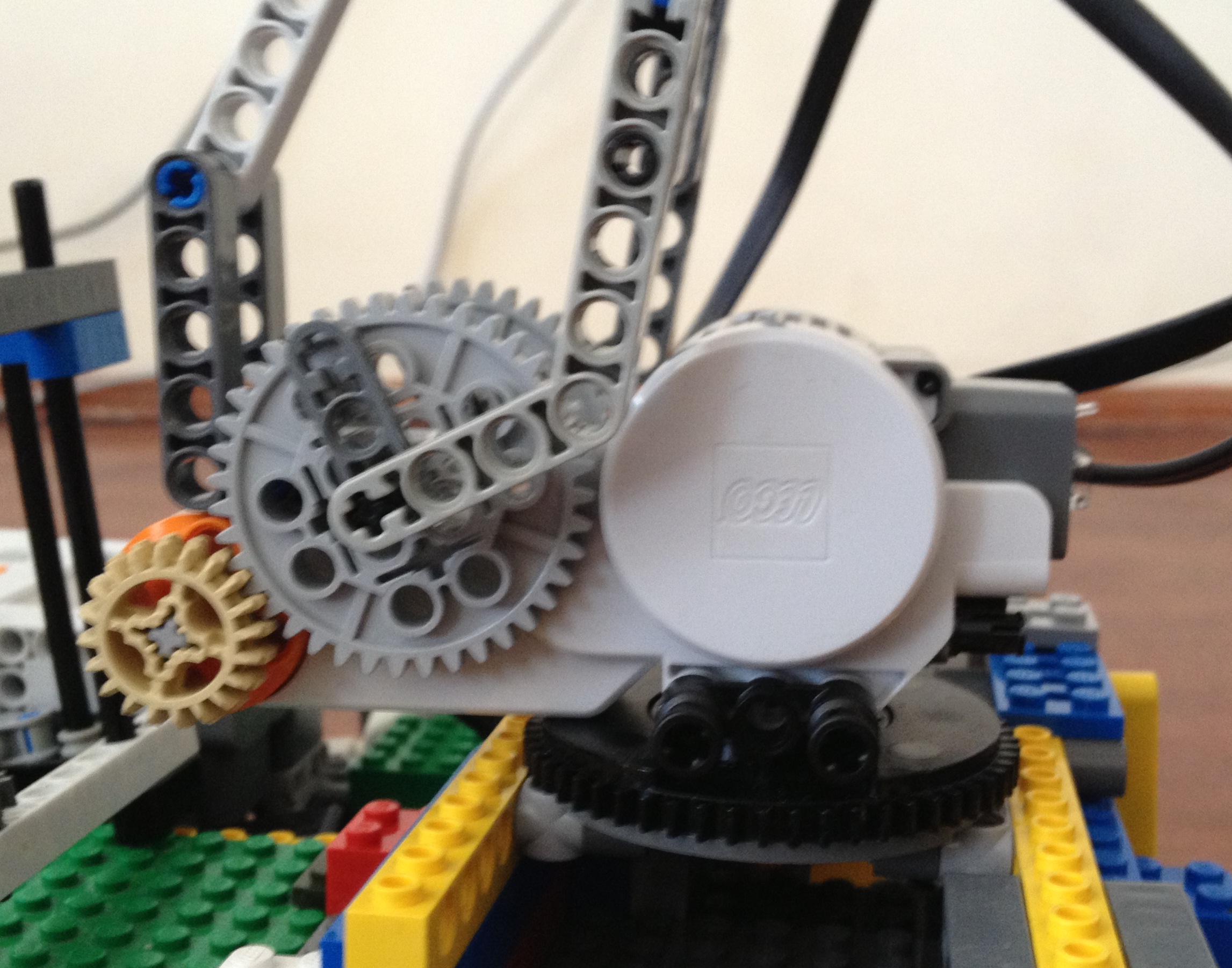
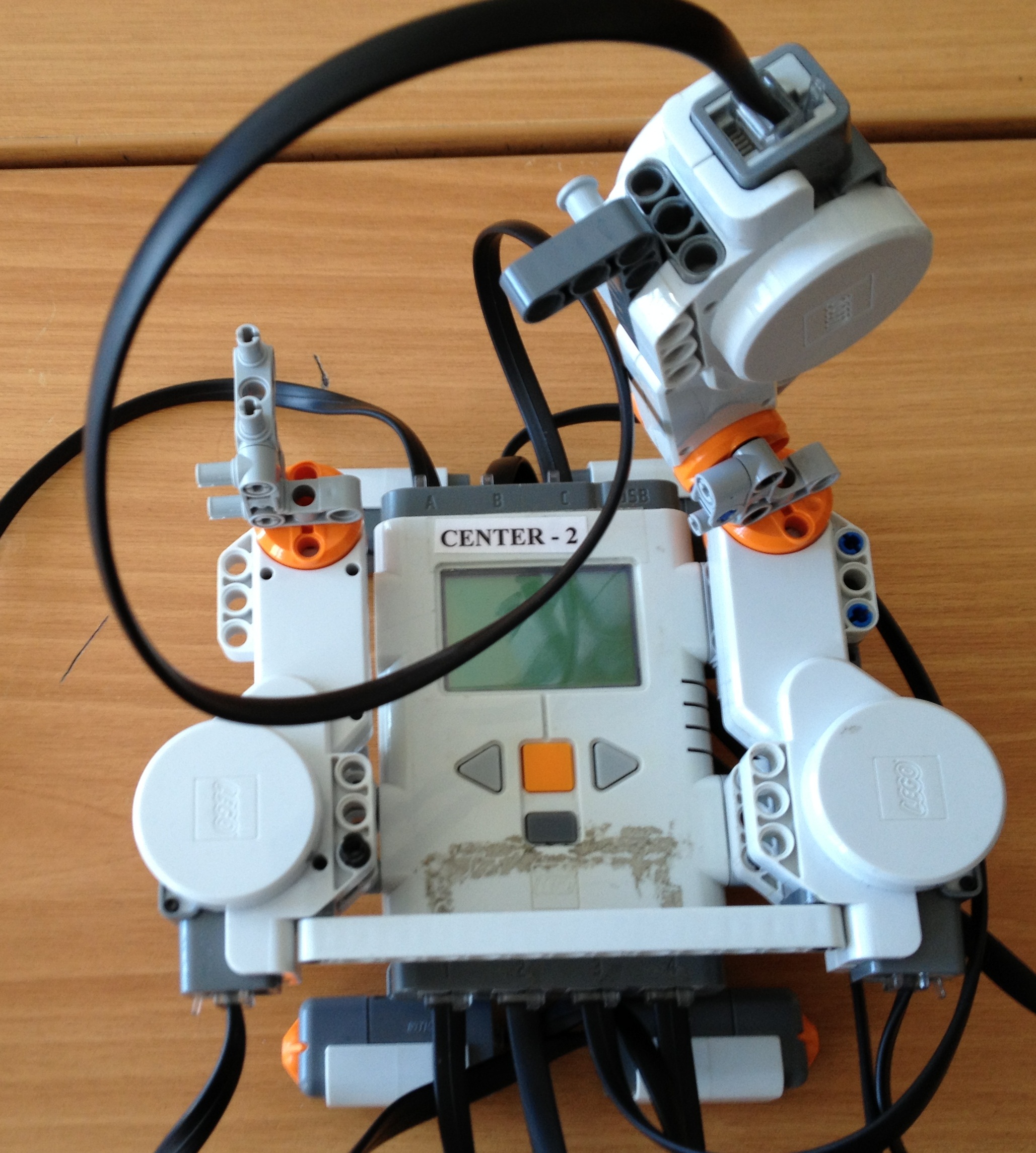
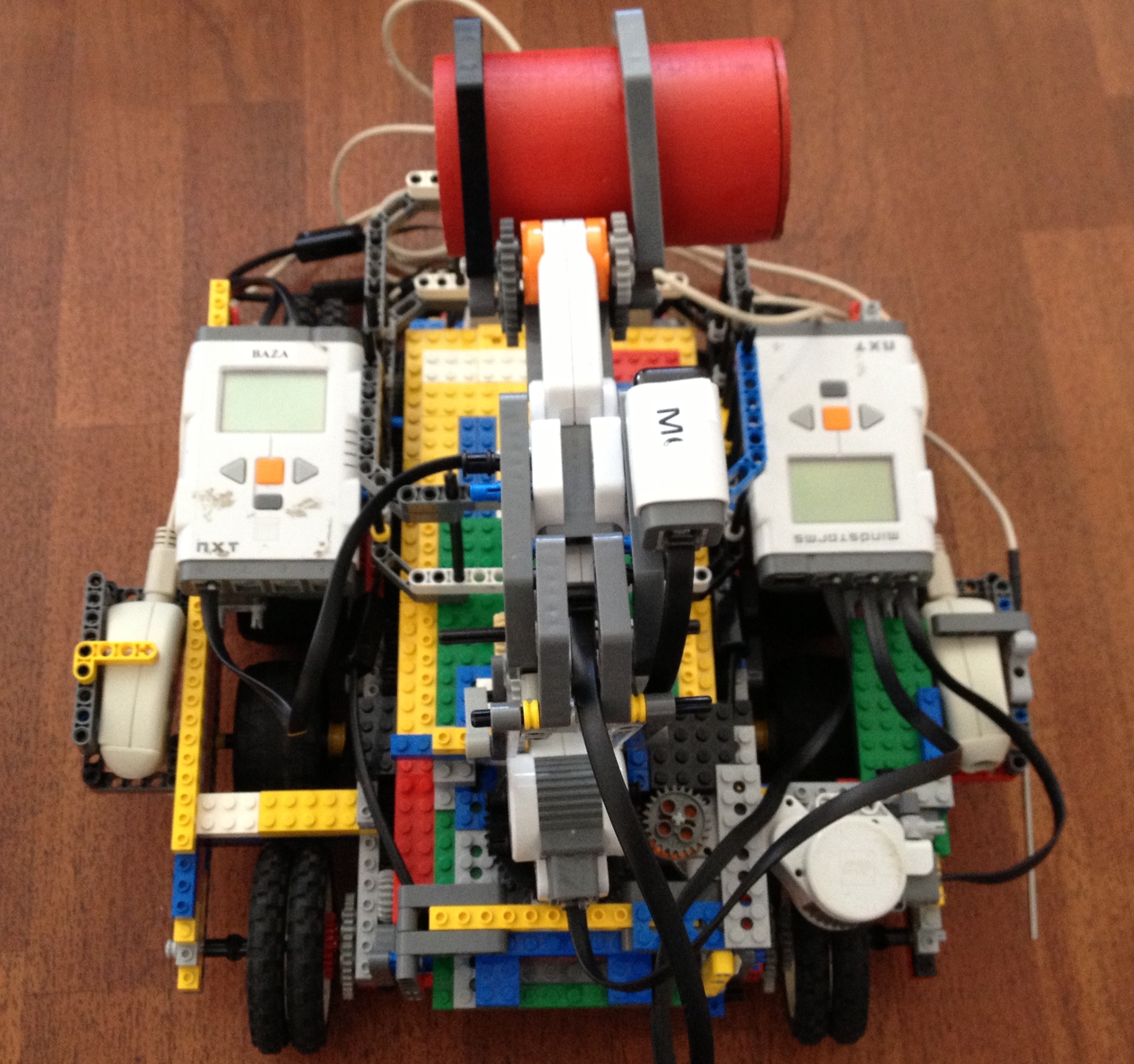
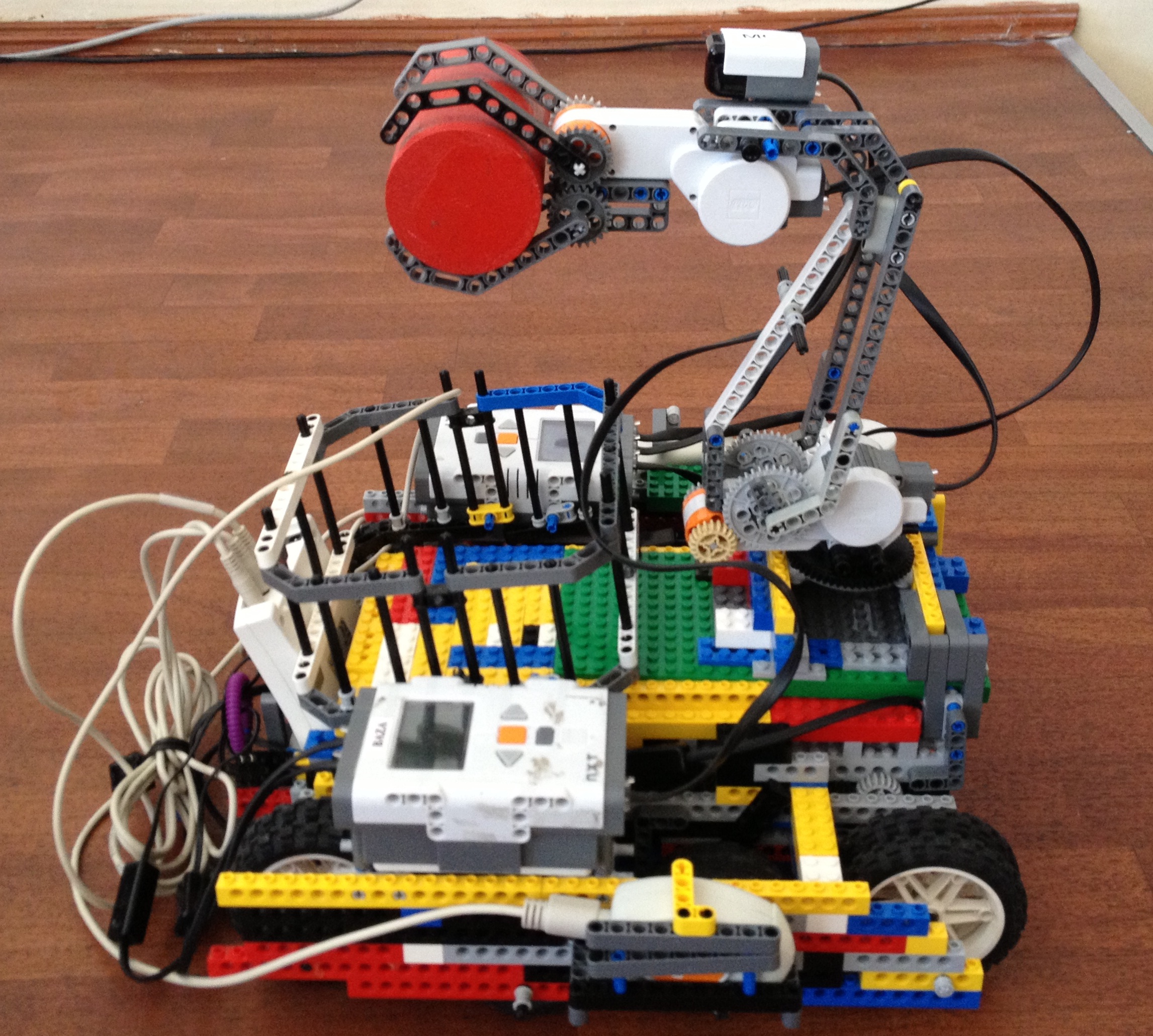
Описание:Целью данной работы было создание мобильного автономного и дистанционно управляемого робота, способного двигаться по пересеченной местности в условиях Арктики, захватывать манипуляторами различные объекты, проводить замеры с помощью датчиков, брать пробы грунта, помогать осуществлять мониторинг территории острова Врангеля и очищать его от скопившего мусора.Принцип действия:Характерными особенностями робота являются:- как автономный, так и дистанционно управляемый режим работы для решения различных задач и выполнения определенных операций. - дистанционное управление роботом осуществляется с помощью протокола Bluetooth. - при автономном режиме роботу задается маршрут и движение осуществляется по датчику – компасу, для возврата робота в исходную точку из любого места нахождения используется инфракрасный датчик. -большое количество независимо управляемых подвижных частей, что позволяет ему выполнять довольно сложные задачи (собрать мусор и сложить его в специальный контейнер). -компактность и манёвренность. -возможность передвижения в пространстве. - проводить замеры и брать пробы грунта для мониторинга объекта. Технические характеристики:Подвижная платформа робота на колёсном ходу оснащена четырьмя сервоприводами, что позволяет роботу осуществлять движение по различным рельефам. Управление движением осуществляется при помощи пульта с джойстиком.Манипулятор робота способен поворачиваться вокруг своей оси на 3600, захватывать объекты сферической, цилиндрической и кубической формы, поднимать и переносить их. В конструкцию робота добавлены датчики из цифровой лаборатории «Архимед»: - датчик освещенности - датчик влажности - датчик индукции магнитного поля - датчик температуры. Алгоритм управления роботом реализован на языке программирования RobotC. |