|
|
Организаторы

Партнеры
![]()

![]()








Творческая категория
Номер команды: ТМ-04
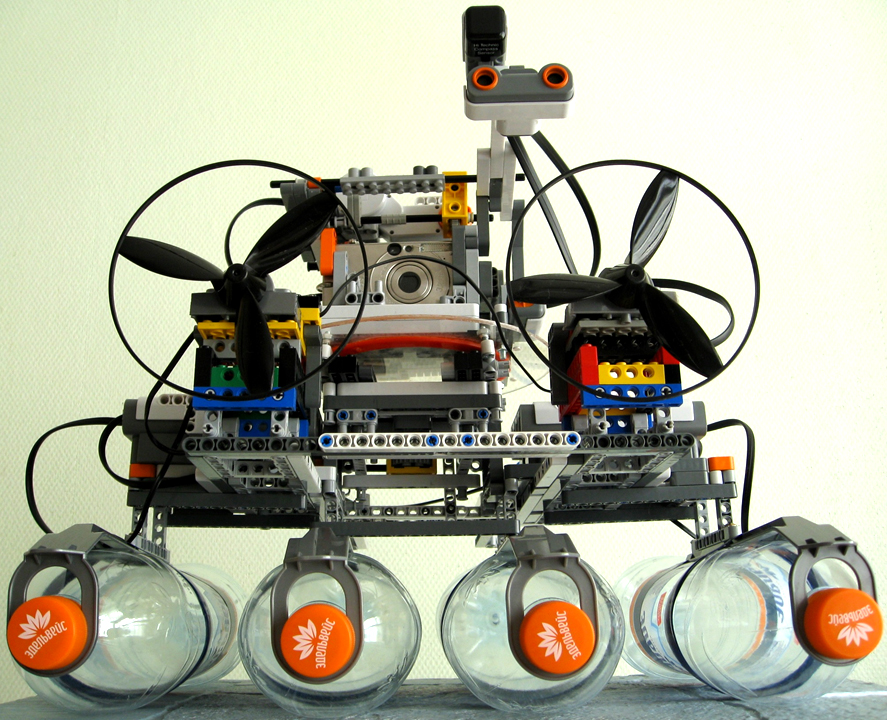
IRBIS
7 место
Всемирное наследие (младшая группа)
- участник всероссийского этапаКоманда: Мехатроник
Регион: Москва
Город: ЗАО Москвы
Название ОУ: ГБОУ ЦО № 1436
Руководитель команды: Максимова Галина Юрьевна
Оператор №1: Серопян Сергей
Оператор №2: Пашков Иван
Дополнительная информация: Голунов Илья
|
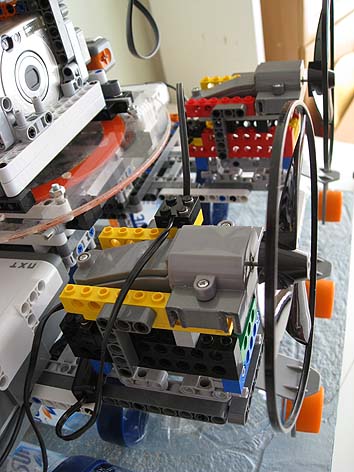
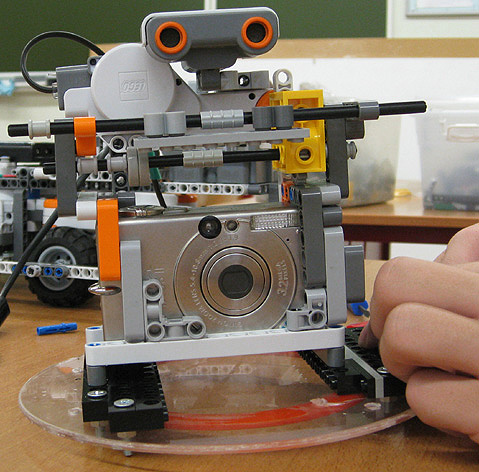
Описание:1. Цель: создание прототипа робота, способного вести спелеоразведку и охрану в обводнённых пещерах.2. Назначение: 1)Помощь начинающим исследователям пещер; 2)Спелеоразведка с целью предотвращения попадания исследователя в экстремальные условия; 3)Охрана пещер от несанкционированного проникновения. 3.Миссия: робот помогает изучать пещеры, чтобы помочь их сохранить. Принцип действия:Управление роботом осуществляется дистанционно с пульта оператором. Оператор на мониторе компьютера наблюдает картинку с камеры, установленной на корпусе робота. Движется и управляется робот при помощи двух воздушных винтов, приводимых в действие нестандартными двигателями. Напряжение питания двигателей не должно превышать 3 В.Воздушные винты позволяют двигаться почти бесшумно.На корпусе робота находится вращающаяся платформа, на которой расположен измерительный комплекс: датчики расстояния, компас, датчик давления и температуры, цифровой фотоаппарат,беспроводная камера. Ориентация в пространстве осуществляется при помощи датчика компас, т.к системы JPS в пещере не сможет работать. Комплекс "датчик расстояния – компас" поможет построить своего рода карту пещеры. На борту имеется система для забора проб воды, анализ которых производится по возвращении робота на базу. Во время путешествия робот ведёт непрерывно фотосъёмку. Наплаву робот удерживается воздушной подушкой.Технические характеристики:Технические устройстваПульт: 1) NXT – 2 2) Двигатели в качестве датчиков угла - 2 3) Датчики касания – 2 Робот: 1)NXT – 3 2)Двигатели с напряжением питания 3В – 2 3)Двигатели стандартные – 3 4)Датчики расстояния – 2 5)Датчик компас – 1 6)Датчик давления и температуры – 1 7)Фотоаппарат 8)Насос 9)Беспроводная камера Воодоизмещение 6 кг, собственная масса около 3 кг, грузоподъёмность около 3 кг. |